ФІЗИКА ДЛЯ БАКАЛАВРІВ. МЕХАНІКА
| Site: | physics.zfftt.kpi.ua |
| Course: | physics.zfftt.kpi.ua |
| Book: | ФІЗИКА ДЛЯ БАКАЛАВРІВ. МЕХАНІКА |
| Printed by: | |
| Date: | Tuesday, 4 August 2026, 3:06 AM |
Table of contents
МЕХАНІКА
Даний посібник присвячено основним положенням класичної механіки, в якій вивчаються повільні рухи тіл у макроскопічних областях простору. При цьому повільними вважаються рухи зі швидкостями, малими відносно швидкості світла \(c=3\cdot{10}^{8}\) м/с, а макроскопічними областями – ті, що є несумірно більші за розміри атомів.
В класичній механіці ставляться й розв’язуються дві основні задачі:
1. Встановлення законів руху – співвідношень, які дозволяють визначати характер і характеристики руху будь-якого тіла чи системи тіл у залежності від їхньої взаємодії між собою та із зовнішніми тілами.
2. Знаходження таких загальних співвідношень між механічними характеристиками, які не залежать ані від складу та будови системи, ані від природи та характеру взаємодії між її тілами.
Пошук загальних методів розв’язування першої задачі привело свого часу І. Ньютона до встановлення загальних законів руху (законів динаміки). Розв’язування ж другої задачі дозволило встановити закони збереження (імпульсу, енергії, моменту імпульсу).
Фізика є точною наукою — свої результати вона виражає як словесно, так і за допомогою математичних співвідношень. Але властивості фізичних об’єктів і явищ є настільки багатогранні, що відобразити їх у всій повноті неможливо. Тому в теорії замість реальних розглядаються ідеалізовані фізичні об’єкти (моделі), які відтворюють лише суттєві для поставлених задач властивості та фактори. В механіці такими є матеріальна точка та абсолютно тверде тіло.Матеріальною точкою називають тіло, розміри та форма котрого в умовах задачі, що розглядається, є неістотними. Отже, матеріальною точкою може бути не лише маленька частинка, а й велике тіло, приміром, Земля при розгляді її взаємодії з іншими небесними тілами та руху в космічному просторі. Тому в даному посібнику скрізь, за винятком механіки твердого тіла, терміни “частинка”, “матеріальна точка”, та “тіло” не розрізняються.
Абсолютно твердим називається тіло, взаємне розташування точок якого є незмінним, тобто — тіло, що не деформується. При розгляді законів руху всі тіла вважаються абсолютно твердими.
Положення тіла у просторі та його рух можна визначити тільки відносно якогось іншого тіла, яке називають тілом відліку. Задля можливості точного задання положення даного тіла відносно тіла відліку з останнім пов’язують ту чи іншу систему координат. Окрім того, для опису руху треба мати ”годинник“ – якийсь загально визнаний принцип фіксації моментів і вимірювання проміжків часу в усіх точках простору (принагідно відзначимо, що вимірювання часу спирається на періодичні процеси, до прикладу, коливання маятника, або напруги в коливальному контурі). При цьому
сукупність тіла відліку, пов’язаної з ним системи координат і нерухомого відносно неї годинника називають системою відліку.
Отже, положення та рух тіла є визначеними тільки відносно конкретної системи відліку. В той же час вибір системи відліку є довільним (це стосується як тіла відліку, так і системи координат) і визначається тільки зручністю опису руху в заданих умовах. Тому
положення в просторі й рух тіл є відносними за самою своєю природою.
Далі розглянуті такі частини МЕХАНІКИ:
1. КІНЕМАТИКА
3. НЕІНЕРЦІАЛЬНІ СИСТЕМИ ВІДЛІКУ
6. ЕЛЕМЕНТИ ДИНАМІКИ ТВЕРДОГО ТІЛА
1. КІНЕМАТИКА
У кінематиці встановлюються поняття та характеристики руху тіл безвідносно до причин, які їх визначають.
Далі розглянуто:
1.1. Кінематика матеріальної точки
1.3. Контрольні запитання
1.2. Кінематика твердого тіла
Рухомі тіла не завжди можна вважати матеріальними точками. Приміром, як у впадку руху деталей та вузлів механізмів і машин. Отож далі окремо розглянуто:
1. Рухи твердого тіла. Кінематика поступального руху
2. Обертальний рух твердого тіла
3. Зв’язок між лінійними та кутовими величинами
4. Загальні рівняння кінематики обертального руху
5. Плоский рух твердого тіла. Миттєва вісь
Рухи твердого тіла. Кінематика поступального руху
Різні точки твердого тіла рухаються не однаково, як, до прикладу, точки на осі та на ободі колеса, що котиться. Тому механіка твердого тіла є набагато складніша за механіку точки, так що можна виокремити декілька його різновидів: 1) поступальний рух; 2) обертання навколо нерухомої осі; 3) плоский рух; 4) обертання навколо нерухомої точки; 5) вільний рух. Основними при цьому є поступальний і обертальний рухи, оскільки, як виявляється, інші різновиди можна розглядати як сукупність цих двох.
Поступальним називають рух, при якому напрям відрізка, що з'єднує будь-які дві точки тіла, лишається незмінним. Прикладом може бути рух кузова автомобіля, або зісковзування бруска по похилій площині без зміни його орієнтації.
Обертальним називають такий рух твердого тіла, коли будь-якої миті всі його точки рухаються по колах із центрами на одній прямій – осі обертання, – що проходить через тіло.
При поступальному русі всі точки тіла рухаються по однакових за формою траєкторіях і в кожен момент часу мають однакову швидкість і прискорення. Отже, поступальний рух тіла визначається рухом будь-якої однієї його точки. Тому розглянута кінематика точки одночасно є й кінематикою поступального руху твердого тіла. Натомість кінематика обертального руху потребує окремого розгляду .
Обертальний рух твердого тіла
Уявімо якесь тіло, що обертається навколо нерухомої осі OZ (рис. 2.1) і розглянемо якусь його точку, що рухається по коловій траєкторії з центром у точці С і радіусом R. Задамо її положення радіусом-вектором \(\vec{r} \) із початком в точці О на осі обертання. За час dt точка здійснює переміщення \( \mathrm{d}\vec{r} \), яке є перпендикулярним до \(\vec{r} \) і має модуль
|
\(\left|\mathrm{d}\vec{r}\right|=R\mathrm{d}\varphi=r\mathrm{d}\varphi\sin\vartheta. \) |
(2.1) |
де \(\mathrm{d}\varphi \) – кут повороту тіла навколо осі обертання за час dt.
|
|
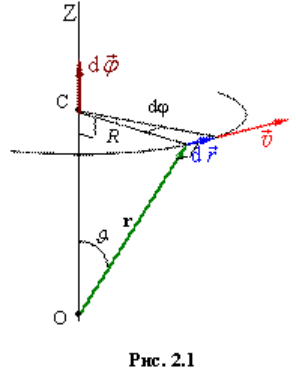
Це співвідношення можна подати так, аби воно відображало й напрям обертання тіла. Задля цього величину dφ розглядають як модуль вектора елементарного кута повороту \( \mathrm{d}\vec{\varphi} \), який напрямлений уздовж осі обертання згідно з правилом правого гвинта.
За цим правилом вектор \( \mathrm{d}\vec{\varphi} \) спрямований у напрямку вкручування правого гвинта, головка якого обертається в одному напрямі з тілом; подібні вектори називаються аксіальними.
У такому разі вираз (2.1) можна, як прийнято в теорії, згорнуто подати через векторний добуток:
|
\(\mathrm{d}\vec{r}=\left[\mathrm{d}\vec{\varphi},\vec{r}\right]. \) |
(2.1а) |
Відтак, поділивши \( \mathrm{d}\vec{r} \) на dt, отримаємо:
|
\(\vec{v}=\left[\frac{\mathrm{d}\vec{\varphi}}{\mathrm{d}t},\vec{r}\right]\). |
(2.2) |
Зрозуміло, що \( \mathrm{d}\vec{\varphi} \) є однаковий для всіх точок. Тому, на відміну від \(\vec{v}\), вектор
|
\(\vec{\omega}=\frac{\mathrm{d}\vec{\varphi}}{\mathrm{d}t}\) |
(2.3) |
є кількісною характеристикою обертового руху всього тіла, тож називається кутовою швидкістю і вимірюється в радіанах за секунду (рад/с).
Зміна вектора кутової швидкості з часом характеризується вектором кутового прискорення \(\vec{\beta} \):
|
\(\vec{\beta}=\frac{\mathrm{d}\vec{\omega}}{\mathrm{d}t}. \) |
(2.4) |
|
|
|
Одиницею кутового прискорення є 1 рад/с2.
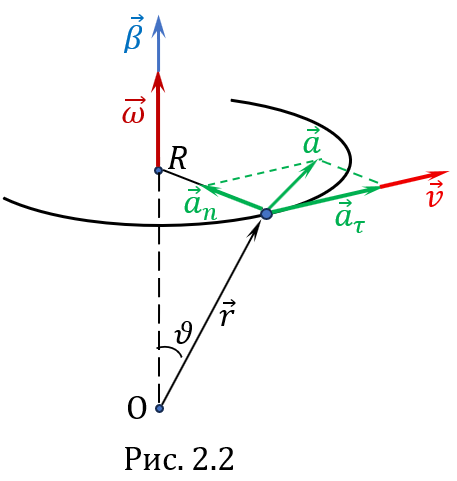
При обертанні навколо фіксованої осі вектор \(\vec{\beta} \), так само як і вектор \(\vec{\omega} \) , напрямлений по осі обертання (рис 2.2). У такому разі зручніше використовувати не вектори, а їхні проекції на напрям осі обертання ОZ:
|
\(\omega_z=\frac{\mathrm{d}\varphi}{\mathrm{d}t},\,\,\,\,\,\,\beta_z=\frac{\mathrm{d}\omega_z}{\mathrm{d}t}. \) |
(2.5) |
При цьому знак ωz визначає напрям обертання, а знак βz – характер обертання (рис. 2.2 відображає прискорене обертання в додатному напрямі осі ОZ).
Якщо під час руху вісь обертання змінює напрям, то \(\mathrm{d}\vec{\omega} \) і \(\vec{\beta} \) спрямовані під кутом до осі.
У найпростішому випадку рівномірного обертання тіла навколо фіксованої осі (\(\vec{\beta}=0,\,\,\,\, \vec{\omega}=\mathrm{const} \)) рух є періодичним, отож окрім кутової швидкості його характеризують періодом Т (часом одного оберту) та частотою n (кількістю обертів за одиницю часу).Позаяк за один оберт тіло повертається на кут 2π, то
|
\( T=\frac{2\pi}{\omega} \) і \( n=\frac{1}{T}=\frac{\omega}{2\pi}. \) |
(2.6) |
Зв’язок між лінійними та кутовими величинами
При розгляді обертального руху окремих точок твердого тіла величини \(\mathrm{d}\vec{r} \) і \(\vec{v}\) відповідно називають лінійними переміщенням і швидкістю, на відміну від кутових переміщення \(\mathrm{d}\vec{\phi} \) та швидкості \(\vec{\omega}\). Між лінійними та кутовими величинами існують зв’язки, що для елементарних переміщень задаються виразами (2.1) і (2.1а), а для швидкостей – виразом (2.2) із урахуванням означення (2.3):
|
\(\vec{v}=\left[ \vec{\omega },\vec{r} \right].\) |
(2.7) |
Отже, для модулів маємо:
|
\( v=\omega{r}\sin\vartheta=\omega{R}, \) |
(2.7а) |
де \( R=r\sin\vartheta \) – радіус кола, по якому рухається точка (рис. 2.2).
Вираз для повного прискорення точки через кутові величини знайдемо диференціюванням виразу (2.7):
|
\( \vec{a}=\frac{\mathrm{d}\vec{v}}{\mathrm{d}t} \) = \(\left[ \frac{\mathrm{d}\vec{\omega}}{\mathrm{d}t},\vec{r} \right]+\left[\vec{\omega },\frac{\mathrm{d}\vec{r}}{dt} \right] \) = \(\left[ \vec{\beta },\vec{r} \right]+\left[ \vec{\omega },\mathbf{\vec{v}} \right],\) |
де враховано, що \(\mathrm{d}\vec{\omega}/\mathrm{d}t=\vec{\beta} \) – вектор кутового прискорення, а \(\mathrm{d}\vec{r}/\mathrm{d}t=\vec{v} \) – вектор лінійної швидкості.
Оскільки при обертанні тіла навколо нерухомої осі вектори \(\vec{\omega }\) і \(\vec{\beta} \) лежать на осі, то вектор \(\left[\vec{\beta},\vec{r}\right] \) напрямлено по дотичній до траєкторії даної точки тіла (рис. 2.2) і є її лінійним (тангенціальним) прискоренням \(\vec{a}_{\tau} \):
|
\(\vec{a}_{\tau}=\left[\vec{\beta},\vec{r}\right]. \) |
(2.8) |
Його проекція на напрям дотичної до кола складає
|
\( a_{\tau}=\beta_z{r}\sin\vartheta=\beta_z{R}. \) |
(2.8а) |
Друга складова повного прискорення \(\left[\vec{\omega},\vec{v}\right] \) при нерухомій осі обертання напрямлена по нормалі до траєкторії точки (рис.2.2), тобто є нормальним прискоренням:
|
\(\vec{a}_n=\left[\vec{\omega},\vec{v}\right]. \) |
(2.9) |
Модуль нормального прискорення
|
\( a_n=\omega{v}={\omega}^2 R. \) |
(2.9а) |
На основі співвідношень (2.8а) і (2.9а) можна визначити модуль і напрям (див. рис. 2.2) повного прискорення точок обертового тіла
$\vec{a}={{\vec{a}}_{\tau }}+{{\vec{a}}_{n}}$
|
\( a=\sqrt{a_{\tau}^2+a_n^2}=R\sqrt{{\beta}^2+{\omega}^4}, \) |
(2.10) |
|
|
\(\mathrm{tg}\alpha=\frac{\omega^2}{\beta}. \) |
(2.10а) |
Загальні рівняння кінематики обертального руху
Кутове прискорення обертового тіла, як і прискорення точки, визначається силовою дією на нього боку інших тіл, отож його можна знайти, аналізуючи фізичні умови, в яких здійснюється обертання. Тому основне завдання кінематики обертового руху тіла полягає у визначенні інших кутових величин через відоме кутове прискорення. При обертанні навколо нерухомої осі це завдання розв’язується так само, як і в кінематиці точки (див. Лекцію 1). При цьому слід зауважити, що за загальним змістом і формальними означеннями кутові характеристики обертового руху – переміщення \(\mathrm{d}\vec{\varphi} \), швидкість \(\vec{\omega} \), прискорення \(\vec{\beta} \) – є такі самі, як і відповідні лінійні величини, що характеризують рух матеріальної точки. Тому й зв’язки між кутовими величинами є такі самі, як і між лінійними. Через це всі основні рівняння кінематики обертального руху навколо фіксованої осі є аналогічні до відповідних рівняннь кінематики руху точки у фіксованому (прямолінійному) напрямі. Зокрема, проекція кутової швидкості визначається загальним рівнянням, аналогічним до рівняння \({{v}_{z}}\) із (1.24):
|
\(\omega_z={\omega}_{0z}+\int\limits_0^t\beta_z\mathrm{d}t, \) |
(2.11) |
де ω0z – проекція початкової кутової швидкості, і βz – проекція кутового прискорення на напрям осі обертання.
У простому випадку рівнозмінного обертання βz = const, отже,
|
\(\omega_z=\omega_{0z}+\beta_z\int\limits_0^t\mathrm{d}t\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\omega_z=\omega_{0z}+\beta_z{t}, \) |
(2.11а) |
що є аналогом рівняння (1.25а).
Кут повороту (кутове переміщення) φ, який визначає зміну положення тіла відносно осі обертання, знаходиться із загального рівняння
|
\(\varphi=\int\limits_0^t\omega_z\mathrm{d}t. \), |
(2.12) |
Це рівняння теж є аналогом рівнянь (1.25) кінематики точки, що визначають зміну положення точки відносно вибраного початку відліку.
При рівнозмінному обертанні \(\beta_z=\mathrm{const} \), \(\omega_z=\omega_{0z}+\beta_z{t} \), отже,
|
\(\varphi=\int\limits_0^t\left(\omega_{0z}+\beta_z{t}\right)\mathrm{d}t \,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\varphi=\omega_{0z}t+\frac{\beta_z{t}^2}{2}. \) |
(2.12а) |
Слід зауважити, що в рівняннях (2.11) – (2.12) величина φ є алгебраїчною, тож число φ/2π не визначає кількості обертів N (повний “шлях”), зроблених тілом за час t. (Виняток становить тільки обертання тіла в незмінному напрямі, коли φ не змінює знаку протягом заданого часу руху). В загальному випадку кількість обертів тіла визначається через модуль кутової швидкості рівнянням
|
\( N=\frac{1}{2\pi}\int\limits_0^t\omega\mathrm{d}t, \) |
(2.12б) |
яке є аналогом рівняння шляху (1.12) в кінематиці матеріальної точки.
Плоский рух твердого тіла. Миттєва вісь
Плоским рухом називається такий рух, при якому всі точки тіла переміщуються в площинах, паралельних до певної нерухомої в обраній системі відліку площини. Будемо називати такі площини “площинами руху”. Прикладом плоского руху може бути кочення циліндра: всі його точки рухаються в перпендикулярних до осі площинах.
Швидкість точки тіла при плоскому русі. Нехай якесь тіло здійснює плоский рух. Прослідкуємо за відрізком АВ, який з’єднує дві точки цього тіла, що знаходяться в площині руху. За деякий проміжок часу відрізок із положення A1B1, переміщується в положення A2B2 (рис. 2.3). Цю зміну положення можна розглядати як результат поступального переміщення в положення A2B′ і повороту в площині руху на деякий кут φ навколо точки А (рис. 2.3а). Але так само можна говорити про поступальне переміщення відрізка в положення A′B2 та поворот навколо точки В (рис. 2.3б). При цьому переміщення точок А і В – A1A2 і B1B2 – не однакові, але кут повороту φ один і той самий. Зрозуміло, що сказане є чинне й для будь якої іншої пари точок і для будь-якого проміжку часу, зокрема, й для нескінченно малого. Тому плоский рух твердого тіла можна розглядати як сукупність поступального руху та обертання навколо фіксованої осі перпендикулярної до площин руху точок тіла. При цьому
кутова швидкість обертання тіла не залежить від вибору такої осі.
|
|
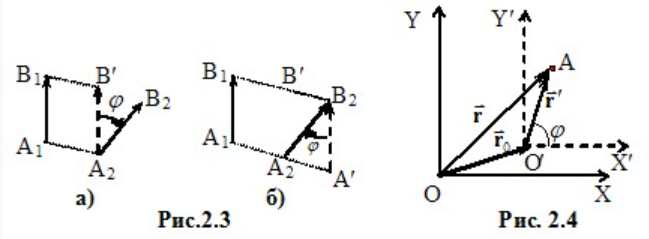
Взявши до уваги сказане, розглянемо рух довільної точки А тіла, що здійснює плоский рух в К-системі відліку XOY так, що точки тіла рухаються в площинах, паралельних XOY (рис. 2.4). Пов’яжемо з тілом рухому K′-систему відліку X′O′Y′ (система), положення початку відліку котрої O′ в К-системі визначається радіусом-вектором \(\vec{r}_0 \) Положення точки А відносно К-системи відліку визначається радіусом-вектором \(\vec{r} \), а відносно K′-системи – радіусом-вектором \(\vec{r}' \). Очевидно, що
\(\vec{r}=\vec{r}_0+\vec{r}', \)
тож переміщення точки А за нескінченно малий проміжок часу dt
\(\mathrm{d}\vec{r}=\mathrm{d}\vec{r}_0+\mathrm{d}\vec{r}'. \)
Переміщення \(\vec{r}' \) зумовлене поворотом тіла навколо осі, що проходить через точки O′, тому \(\mathrm{d}\vec{r}'=\left[\mathrm{d}\vec{\varphi},\vec{r}'\right] \) (див. (2.1а)). Отже
\(\mathrm{d}\vec{r}=\mathrm{d}\vec{r}_0+\left[\mathrm{d}\vec{\varphi},\vec{r}'\right]. \)
Поділивши останній вираз на проміжок часу dt, одержимо швидкість точки А в К – системі відліку:
|
\(\vec{v}=\vec{v}_0+\left[\vec{\omega},\vec{r}'\right]. \) |
(2.13) |
Таким чином, при плоскому русі швидкість довільної точки А твердого тіла складається із швидкості \(\vec{v}_0 \) будь-якої іншої точки O′, що жорстко зв’язана з ним (така точка може розміщуватися й поза тілом), і лінійної швидкості \(\vec{v}=\left[\vec{\omega},\vec{r}\right] \) обертального руху точки А навколо осі, що проходить через точку O′ перпендикулярно до площини руху.
Миттєва вісь. Оскільки вибір точки O′ є довільний, плоский рух тіла можна звести до чисто обертального. Справді, при плоскому русі вектори \(\vec{v}_0 \) і \(\vec{v}' \) є перпендикулярні до вектора кутової швидкості \(\vec{\omega}\) , отже обидва лежать в одній площині руху. Тому в кожну мить існує така жорстко зв’язана з тілом точка М, миттєва швидкість якої \(\vec{v}' \) в К – системі відлікурівна нулю. ЇЇ радіус-вектор \({{\vec{r}}_{m}}^{\prime }\) визначається із співвідношення (2.13):
|
\( {\vec{v}}_{0}^{\prime}+\left[\vec{\omega},\vec{r}_{m}^{\prime} \right]=0\quad \Rightarrow \quad \left[\vec{\omega},{\vec{r}}_{m}^{\prime}\right]=-\vec{v}_{0}^{\prime} \) |
(2.14) |
Зокрема, модуль \({{\vec{r}}_{m}}^{\prime }\) , тобто відстань між точками М і O′, дорівнює:
|
\({r}_{m}^{\prime }=\frac{{{v}_{0}}}{\omega }\) |
(2.14а) |
(При потребі детальнішої інформації вираз (2.14) слід розписати в координатній формі за правилами розкриття векторного добутку)
Оскільки точка М у дану мить є нерухома, рух тіла в цей момент можна трактувати як чисте обертання навколо осі, що проходить через цю точку перпендикулярно до площини руху. Таку вісь називають миттєвою віссю. В загальному випадку положення миттєвої осі може змінюватися з часом. Наприклад, при коченні циліндра без ковзання по плоскій поверхні миттєва вісь збігається з лінією дотику циліндра до поверхні й рухається із швидкістю осі циліндра. Поняття миттєвої осі є досить продуктивним, оскільки в багатьох випадках спрощує аналіз плоского руху.
1.3. Контрольні запитання
- Що таке система відліку?
- Як треба розуміти відносність руху?
- Які кінематичні величини використовують для опису руху матеріальної точки?
- Які існують способи опису руху?
- Який зв’язок існує між радіусом-вектором точки та її декартовими координатами? Між вектором швидкості та його проекціями на декартові осі координат?
- Що таке нормальне, тангенціальне та повне прискорення? Який між ними існує зв’язок?
- Що можна сказати про тангенціальне та нормальне прискорення точки, якщо вона здійснює: прямолінійний нерівномірний рух? криволінійний рівномірний рух?
- Як змінюється кут між вектором повного прискорення та вектором швидкості у випадку прискореного руху точки по колу?
- Як записуються формули (1.33) і (1.33а) в координатній формі для систем відліку, описаних в п. 1.4?
- Які види рухів може здійснювати тверде тіло? Які з них можна вважати основними?
- Які величини використовують для опису обертального руху?
- Як напрямлений вектор кутової швидкості твердого тіла?
- Як напрямлений вектор кутового прискорення? В якому випадку вектори кутової швидкості та кутового прискорення є колінеарними? Співнапрямленими?
- Який зв’язок існує між векторами лінійної та кутової швидкості? Між їхніми модулями?
- Як виражаються тангенціальне, нормальне та повне прискорення точки обертового тіла через кутові характеристики руху?
- Вивести співвідношення (2.11) і (2.12).
- Який рух твердого тіла називається плоским? Наведіть декілька прикладів.
- Що таке миттєва вісь? Яку перевагу вона дає при розгляді плоского руху тіла?
2. ОСНОВНІ ЗАКОНИ ДИНАМІКИ

Динаміка – це розділ механіки, в якому закони руху тіл встановлюються через причини, що зумовлюють його характер. Основу динаміки складають три закони Ньютона, котрі є узагальненням результатів спостережень і спеціально поставлених експериментів, і які не можна вивести з якихось більш простих принципів. Закони Ньютона мають і велике практичне значення, на них ґрунтуються розрахунки різноманітних машин і механізмів, будівельних конструкцій, космічних апаратів, тощо. Щоправда, закони Ньютона навіть у рамках класичної механіки не є універсальними і виконуються тільки в так званих інерційних системах відліку.
Далі розглянуто наступні питання:
| 2.1. Інерційні системи відліку. Перший закон Ньютона | |
| 2.2. Другий закон Ньютона. Сила | |
| 2.3. Третій закон Ньютона | |
| 2.4. Основне рівняння динаміки | |
| 2.5. Закони сил | |
| 2.6. Контрольні запитання |
2.1. Інерційні системи відліку. Перший закон Ньютона
Як відзначалося в кінематиці, для опису руху тіл принципово можна користуватися будь-якими системами відліку. При цьому в довільній системі відліку характер руху тіла (зміна швидкості з часом, форма траєкторії, тощо) визначається не лише дією інших тіл, а й властивостями системи відліку. Тож рух даного тіла в різних системах відліку може бути складнішим, або простішим (до прикладу, видимий рух планет на небосхилі, тобто відносно Землі, є дуже складним, тоді як відносно Сонця він відбувається по простих еліптичних траєкторіях). Але існують такі системи відліку, в яких характер руху тіла визначається тільки дією на нього з боку інших тіл. Такі системи називаються інерційними системами відліку (ІСВ).
Особливості ІСВ відображує перший закон Ньютона, за яким
в інерційній системі відліку тіло за відсутності взаємодії з іншими тілами зберігає стан спокою або рівномірного прямолінійного руху.
Рух вільного тіла називається рухом за інерцією, тож і перший закон Ньютона інакше називають законом інерції.
В інерційних системах відліку простішими, ніж в інших, є закони руху не лише вільних, а будь-яких інших тіл. Тому в науці при розгляді руху інерційні системи відліку є переважними. Але в зв'язку з цим виникає наступне питання. Інерційність системи відліку визначається характером руху в ній вільного тіла, але абсолютно вільних тіл у природі принципово не існує. Отже, теоретично довести інерційність тої, чи іншої системи відліку неможливо. Це є питанням досліду, і саме дослід свідчить, що такі системи відліку існують (у зв’язку з цим деякі автори трактують перший закон Ньютона як аксіому про існування інерційних систем відліку). Численні спостереження показують, що з гранично великою точністю інерційними можна вважати системи відліку, пов’язані із віддаленими “нерухомими” зірками та з Сонцем, а також такі, що рухаються відносно зірок поступально, рівномірно та прямолінійно, тобто без будь-яких прискорень. Що ж до систем відліку, пов’язаних із Землею, які найчастіше використовують на практиці, то їх можна вважати інерційними лише наближено через наявність у них невеликих прискорень зумовлених обертанням Землі навколо власної осі та орбітальним рухом навколо Сонця.
2.2. Другий закон Ньютона.
Сила. Дослідні факти вказують на те, що в інерціальній системі відліку зміна стану руху тіла зумовлюється виключно дією на нього з боку іншого тіла чи тіл. Кількісною мірою такої дії є сила – одна з основних величин динаміки. Сила має такі загальні властивості.
– Зовнішньою ознакою сили є зміна швидкості тіла (ще одною ознакою сили є деформація тіл, але при вивченні законів руху вона є несуттєвою).
– Дія одного тіла на інше завжди має певний напрям, тому сила є векторною величиною.
– Якщо матеріальна точка взаємодіє не з одним, а з декількома іншими тілами, то, як показує дослід, діюча на неї сила визначається як
|
\(\vec{F}=\vec{F}_{1}+\vec{F}_{2}+...=\sum_{i}\vec{F}_{i}\), |
(3.1) |
де \(\vec{F}_i \) – сила, яка би діяла на точку з боку і-того тіла за відсутності інших (рис. 3.1).
 |
У цьому сенсі говорять, що сили \(\vec{F}_i\) підпорядковані принципу суперпозиції. Силу \(\vec{F}\) називають рівнодійною силою, а \(\vec{F}_i\) – складовими силами. Поняття рівнодійної є зручним, оскільки дозволяє лаконічно записувати й формулювати відповідні закони та співвідношення механіки. З іншого боку, задану силу можна розкладати на будь-які складові так, аби виконувалося співвідношення (3.1). Але слід зауважити, що для тіл, які не можна вважати матеріальними точками, поняття рівнодійної існує тільки тоді, коли лінії дії всіх прикладених до тіла окремих сил перетинаються в одній точці.
– У механіці всі сили поділяють на два класи: сили, що виникають при безпосередньому контакті тіл (сила тертя, сила опору, сила тиску, тощо), та сили, що діють між тілами на відстані (наприклад, сила всесвітнього тяжіння, сила взаємодії між електричними зарядам та струмами). В останньому випадку кажуть, що в просторі існує силове поле (гравітаційне, електромагнітне), в якому на дане тіло діє певна сила (зазначений поділ є умовним, оскільки на молекулярному рівні поняття дотику втрачає прямий зміст, бо взаємодія між молекулами здійснюється не “безпосередньо”, а через створюване ними електромагнітне поле).
– Сили різної фізичної природи мають різні властивості, але у загальному випадку сила взаємодії між двома тілами визначається їх взаємним розташуванням і швидкістю їх руху одне відносно одного: \(\vec{F}=\vec{F}\left( \vec{r},\vec{v} \right)\).
Маса та імпульс. Другий закон Ньютона
Маса та імпульс. Досліди показують, що будь-яке тіло “чинить опір” при спробах зміни його швидкості, через що швидкість тіла неможливо змінити миттєво навіть на дуже малу величину. Ця властивість називається інертністю тіла. Мірою інертності тіла є його маса. Чим більша інертність, тим більша маса тіла, тож під дією однакової сили швидкість тіла з більшою масою змінюється повільніше, ніж у тіла з меншою масою.
Масу тіл визначають, у той чи інший спосіб порівнюючи її з масою еталона. Одиницею маси в міжнародній системі одиниць (CІ) є 1 кілограм (кг) – маса еталонного тіла, яке зберігається в міжнародному метрологічному центрі (м. Севр поблизу Парижа).
Дослід свідчить, що маса має дві важливі властивості:
1). Маса є скалярною й, у межах ньютонівської механіки, адитивною величиною, тобто маса тіла дорівнює сумі мас його складових частин.
2). Інертність є внутрішньою властивістю тіла, тому маса тіла не залежить від його руху, отже й від системи відліку, в якій розглядається рух.
Через наявність інертності механічний стан тіла визначається не лише швидкістю, а й масою. Наприклад, ми легко зупинимо рукою кульку для пінг-понгу, але цього не можна сказати про вагон. Тому в динаміці мірою стану руху тіла є імпульс – добуток маси тіла на вектор його швидкості:
|
\(\vec{p}=m\vec{v}, \) |
(3.2) |
отже імпульс є вектором напрямленим, як і швидкість, по дотичній до траєкторії руху тіла. Одиницею імпульсу є 1 кг·м/с.
Імпульс теж є адитивною величиною – імпульс системи дорівнює сумі імпульсів усіх тіл, які входять до її складу:
|
\(\vec{P}=\sum_{i}\vec{p}_{i}=\sum_{i}m_{i}\vec{v}_{i}\). |
(3.2а) |
Другий закон Ньютона. Аналізуючи результати дослідів і спостережень за рухом тіл, Ньютон встановив, що швидкість зміни імпульсу тіла (тут і далі мається на увазі матеріальна точка) повністю визначається силою, що діє на нього, згідно з рівнянням:
|
\(\frac{\mathrm{d}\vec{p}}{\mathrm{d}t}=\vec{F}, \) |
(3.3) |
де \(\mathrm{d}\vec{p} \) - зміна імпульсу за нескінченно малий проміжок часу dt і \(\vec{F} \) - рівнодійна сила, прикладена до тіла (зауважимо, що математично ліва частина цього виразу являє собою похідну імпульсу по часу).
Це твердження становить другий закон Ньютона. Його також записують у вигляді:
|
\(\mathrm{d}\vec{p}=\vec{F}\mathrm{d}t. \) |
(3.4) |
Величину \(\vec{F}\mathrm{d}t \) називають імпульсом сили за час dt. Отже другий закон Ньютона можна сформулювати й так:
приріст імпульсу тіла за певний проміжок часу дорівнює імпульсу сили , що діє на тіло протягом цього часу.
При необхідності визначати зміну імпульсу за скінчений проміжок часу t1 - t2 вираз (3.4) треба інтегрувати на проміжку від t1 до t2:
|
\(\Delta\vec{p}=\vec{p}_2-\vec{p}_1=\int\limits_{t_1}^{t_2}\vec{F}\mathrm{d}t.\) |
(3.4а) |
Якщо маса тіла не змінюється (m = const), то \(\mathrm{d}\vec{p}=\mathrm{d}(m\vec{v})=m\mathrm{d}\vec{v} \) і тоді \(\mathrm{d}\vec{p}/\mathrm{d}t=m\vec{a}\), де \(\vec{a}=\mathrm{d}\vec{v}/\mathrm{d}t \) – прискорення. Отже, для тіла незмінної маси другий закон Ньютона можна записати у вигляді:
|
\( m\vec{a}=\vec{F}, \) |
(3.5) |
тобто,
добуток маси тіла на його прискорення дорівнює рівнодійній силі, що прикладена до тіла.
На основі цього рівняння встановлена одиниця сили - ньютон (Н): 1 Н - то є сила, котра тілу маси 1 кг надає прискорення 1 м/с2.
2.3. Третій закон Ньютона
Важливим дослідним фактом є те, що дія одного тіла на інше завжди має взаємний характер, тобто сили є проявом взаємодії між тілами. Третій закон Ньютона виражає загальну властивість сил взаємодії між тілами:
сили, з якими два тіла діють одне на одне, завжди рівні по модулю і напрямлені у протилежні боки вздовж прямої, що з’єднує тіла (рис.3.2).
|
|

Отже
|
\(\vec{F}_1=-\vec{F}_2. \) |
(3.6) |
Щодо наведеного формулювання треба зауважити таке.
– Сили взаємодії завжди мають одну й ту саму фізичну природу та походження.
– Будь-яка сила, що діє на тіло, не залежить від інших прикладених до нього сил. Тому третій закон Ньютона виконується й у довільній системі (сукупності тіл) для кожної пари тіл.
2.4. Основне рівняння динаміки
Основне рівняння динаміки
Закони Ньютона є системою органічно взаємопов’язаних тверджень, і в будь-якій задачі динаміки “працюють” усі три закони. Але основним є другий закон Ньютона, оскільки він безпосередньо оперує характеристиками руху – імпульсом або прискоренням (рівняння (3.3), (3.5)).
Враховуючи, що прискорення \(\vec{a}=\frac{\mathrm{d}^2\vec{r}}{\mathrm{d}t^2} \), другий закон Ньютона (3.5) можна подати у вигляді диференціального рівняння
|
\(\frac{\mathrm{d}^2\vec{r}}{\mathrm{d}t^2}=\frac{\vec{F}}{m},\) |
(3.7) |
яке є основним рівнянням динаміки матеріальної точки. Це рівняння також називають основним рівнянням руху, позаяк за його допомогою можна розв’язати основну задачу динаміки – визначити закон руху тіла, тобто залежність його радіус-вектора від часу \(\vec{r}=\vec{r}(t)\). Для цього треба проінтегрувати рівняння (3.7) при відомій залежності сили від часу \(\vec{F}=\vec{F}\left( t \right)\) і заданих початкових умовах – початкових швидкості \(\vec{v}_0=\vec{v}(0)\) і радіус-векторі \(\vec{r}_0=\vec{r}(0)\).
Розв’язування диференціального рівняння називається його інтегруванням, оскільки зводиться до однойменної математичної процедури. На загал, для цього треба знати теорію диференціальних рівнянь, але в простих задачах достатньо й початкових відомостей з інтегрального числення. Рівняння (3.7) дозволяє розв’язувати й обернені задачі. А саме, визначати силу, що діє на точку, та її швидкість і прискорення, якщо відомий закон руху. Такі задачі є досить простими і зводяться до диференціювання по часу заданої функції \(\vec{r}(t) \).
2.5. Закони сил
Для визначення закону руху тіла необхідно мати повну інформацію про діючі на нього сили, тобто, знати їхні закони (математичні вирази).
У макроскопічному світі спостерігається багато різних сил, проте всі вони є проявами лише двох фундаментальних (таких, що не зводяться до інших) взаємодій – гравітаційної та електромагнітної. При цьому гравітація відіграє вирішальну роль у всесвітньому тяжінні, а електромагнітні сили є відповідальні за контактну взаємодію між тілами – тертя та опір середовища. Крім указаних, відомі ще два види фундаментальної взаємодії – сильна та слабка, – але на механічні явища вони ніяк не впливають.
Гравітаційна сила та сила тяжіння. Гравітаційна взаємодія полягає в тому, що всі тіла притягаються одне до одного, згідно із законом всесвітнього тяжіння Ньютона гравітаційна сила притягання між двома матеріальними точками є прямо пропорційною їхнім масам \(m_1\), \(m_2\) і обернено пропорційною квадратові відстані r між ними:
|
\(F=G\frac{m_1 m_2}{r^2}\), |
(3.8) |
де величина G = 6,67·10-11 м3/(кг·с2), яка називається гравітаційною сталою, показує “силу” гравітаційної взаємодії. А саме, G чисельно дорівнює силі притягання двох тіл масою по 1 кг на відстані 1 м одне від одного. Отже, гравітаційні сили є гранично слабкими і відіграють істотну роль лише тоді, коли хоча б одне з тіл має астрономічну масу (планети та зірки).
Гравітаційна сила діє вздовж прямої, що з’єднує тіла — партнери взаємодії.
Варто звернути увагу на те, що величини m1 і m2 в законі всесвітнього тяжіння визначають не інертність тіл, а їхню здатність до взаємного притягання, тобто вони є гравітаційними масами, на відміну від інертних мас тіл, що фігурують у другому законі Ньютона. Але в дослідах встановлено, що гравітаційна та інертна маси є строго прямо пропорційні одна одній. Тому гравітаційну та інертну маси не розрізняють і говорять просто про масу тіла та вимірюють в одних і тих самих одиницях. Отже, фізична величина "маса" є і мірою інертності тіл, і мірою їхньої здатності до гравітаційної взаємодії.
Використовуючи формулу (3.8), слід пам’ятати, що вона є придатною тільки для матеріальних точок, тобто для тіл, які розташовані одне від одного на дуже великій відстані порівняно з їхніми розмірами. Виняток складає притягання двох однорідних куль (або кулі та матеріальної точки). В цьому випадку r – це відстань між центрами куль (або центром кулі та матеріальною точкою). Зокрема, це стосується сили тяжіння, тобто сили гравітаційного притягання, що діє на тіла поблизу поверхні планети. Згідно з формулою (3.8) вона визначається як
|
\(F=G\frac{mM}{R^2}\), |
(3.8а) |
де m - маса тіла; М, R - маса і радіус планети.
Гравітаційна сила є прямо пропорційною масі тіла, на яке діє. Тому біля поверхні планети вона надає всім тілам однакового прискорення сили тяжіння або прискорення вільного падіння (це не зовсім точно, оскільки на прискорення вільного падіння тіла відносно Землі дещо впливає її добове обертання та орбітальний рух)
|
\(g= G\frac{M}{R^2}\), |
(3.9) |
яке напрямлене вертикально вниз. Для Землі наближено \(g=9,8\) м/с2. З урахуванням (3.9) силу тяжіння записують у вигляді
|
\(\vec{F}=m\vec{g}\). |
(3.10) |
Пружна сила
Пружна сила (сила пружності) виникає при пружних деформаціях тіл, наприклад, при розтягу пружини, або еластичного шнура чи стержня (пружними називають деформації, котрі зникають після припинення дії сили, що їх спричинює). Вона зумовлена дією електромагнітних сил взаємодії між молекулами деформованого тіла. Пружна сила завжди напрямлена протилежно до напрямку деформації й за модулем є прямо пропорційною величині деформації (закон Гука). Для деформації розтягу чи стискання величина (модуль) пружної сили
|
\(F=k\Delta{l}\), |
(3.11) |
де \(\Delta{l}=\left|{l}-l_{0}\right|\) – величина деформації, \(l,\,\,\,l_0\) – довжина деформованої та недеформованої пружини, відповідно, і k - коефіцієнт пропорційності, який називають жорсткістю тіла.
Для стержня (шнура) або пружини довжиною l із сталим перерізом s
|
\(k=E\frac{s}{l}\), |
(3.12) |
де Е – так званий модуль Юнга, що є табличною характеристикою пружних властивостей речовини тіла. У такому разі вираз закону Гука можна подати у вигляді:
|
\(\sigma=E\epsilon\) або \(\epsilon=\frac{\sigma}{E}\), |
(3.13) |
де \(\epsilon=\Delta{l}/l_0\) – відносна деформація і \(\sigma=F/s\) – механічна напруга, що виникає в тілі внаслідок деформації.
Вага і невагомість
Якщо тіло лежить на опорі (чи підвішене на шнурі), то через його притягання до Землі виникає деформація як опори (підвісу), так і самого тіла. Як наслідок, з’являються сили взаємодії між тілом і опорою (підвісом).
Сила, що діє з боку тіла на горизонтальну опору або вертикальний підвіс унаслідок притягання до Землі називається вагою тіла \( \vec{P} \) (рис. 3.3).
|
|

Відповідно, сила, що діє на тіло з боку опори (підвісу) називається реакцією опори \(\vec{N} \) або підвісу \(\vec{T}\). Отже вага тіла прикладена не до нього, а до опори чи підвісу. Якщо опора (підвіс), отож і тіло, не має прискорення відносно інерціальної системи відліку, то \( m\vec{g}+\vec{N}=0 \) i, оскільки \(\vec{N}=-\vec{P} \),
|
\(\vec{P}=m\vec{g},\) |
(3.14) |
тобто, вага тіла дорівнює силі тяжіння, що діє на нього (з цієї причини силу тяжіння інколи теж називають вагою). Але, коли опора (підвіс) має прискорення \(\vec{a}\), то згідно з другим і третім законами Ньютона \( m\vec{a}=m\vec{g}+\vec{N}=m\vec{g}-\vec{P} \), і
|
\(\vec{P}=m(\vec{g}-\vec{a}). \) |
(3.14а) |
Отже, вага залежить від прискорення опори і може бути або більшою (при русі вгору), або меншою (при русі вниз), ніж mg. Зокрема, коли опора (підвіс) рухається вниз із прискоренням \(\vec{a}=\vec{g}\) , то \(\vec{P}=0 \), і тіло перебуває в невагомості. При цьому \(\vec{N}=0 \), тобто в стані невагомості на тіло діє тільки сила тяжіння. Із залежністю ваги від прискорення опори ми повсякденно стикаємося в ліфті, але особливо відчутно це для космонавтів: вони зазнають великих перевантажень при виході ракети на орбіту та перебувають у невагомості протягом усього часу орбітального польоту.
Сили тертя та опору
З дослідів відомо, що при ковзанні даного тіла по поверхні іншого, або ж при спробах такого руху виникає сила, що перешкоджає рухові. Цю силу називають силою сухого тертя. Якщо при спробі примусити одне тіло ковзати по поверхні іншого закріпленого тіла перше залишається у спокої, то тертя, що виникає, називають тертям спокою. Якщо ж тіла рухаються одне відносно одного, то залежно від характеру руху говорять про тертя ковзання, або тертя кочення. Тертя між частинами одного й того ж тіла при їх відносному русі, наприклад, тертя між сусідніми шарами рідини чи газу, що рухаються із різними швидкостями, називають внутрішнім тертям.
Властивості сили тертя визначаються умовами, за яких вона виникає. Зокрема, сила тертя спокою \(\vec{F}_c \) дорівнює сумі векторів решти сил (рівнодійній), що діють на дане тіло, взятій зі знаком мінус:
|
\( \vec{F}_{c}= -\sum\vec{F}_{i} \) |
(3.15) |
(У цьому легко впевнитися на основі другого закону Ньютона. Якщо тіло знаходиться у спокої, то його прискорення \(\vec{a}=0 \),отже і сума сил, що діють на тіло \(\Sigma(\vec{F}_i+\vec{F}_c)=0 \), звідси і випливає вираз (3.15)).
Окрім того, в дослідах встановлено, що величина сили тертя спокою не може перевищувати певного максимального значення
|
\( F_{c\,\max}=\mu{N}, \) |
(3.16) |
де \(\mu\) – коефіцієнт тертя, який залежить від природи і стану дотикових поверхонь (зокрема їхньої шерхлості), N – сила нормального тиску, що притискає дане тіло до поверхні іншого.
Якщо рівнодійна решти сил, прикладених до тіла, перевищує значення \(F_{c\,\max}\), то це тіло починає рухатися по поверхні іншого, і тертя спокою змінюється на тертя ковзання. Величина сили тертя ковзання Fт досить складно залежить від відносної швидкості тіл (рис. 3.4а), але при достатньо малих швидкостях її можна вважати сталою (рис.3.4б) і рівною максимальній силі тертя спокою
|
\(F_{т}=\mu{N}\), |
(3.16а) |
|
|
|

Сила опору \(\vec{F}_{оп}\) виникає при русі тіла в газоподібному чи рідкому середовищі й зумовлена взаємодією його молекул із молекулами поверхні тіла та тертям між шарами самого середовища (в’язкістю). При цьому через велику рухливість молекул газу та рідини при русі в середовищі немає тертя спокою.
Сила опору спрямована проти руху тіла й істотно залежить від його швидкості відносно середовища. При малих швидкостях можна вважати, що
|
\({{\vec{F}}_{on}}={{\alpha }}v{{\vec{e}}_{v}}\) |
(3.17) |
де α – стала величина (коефіцієнт опору), залежна від характеристик тіла і середовища, \( \vec{e}_{v} \) – орт вектора швидкості. При великих швидкостях ця залежність є близькою до квадратичної, а при надзвукових — до кубічної
Характерною властивістю сил опору є їхня велика залежність від форми рухомого тіла. Тому рухомим апаратам (авто, літаки, ракети, тощо) надають специфічної обтічної форми.
2.6. Контрольні запитання
- Чим вивчення механічного руху в динаміці відрізняється від такого в кінематиці?
- Говорять, що маса є мірою інертності тіла. А що таке інертність?
- Який фізичний зміст має поняття “сила”? Які загальні властивості вона має?
- З рівняння (3.5) випливає, що при \(\vec{F} =0 \) прискорення \(\vec{a}=0 \), і \(\vec{v}=\mathrm{const}\), тобто, тіло рухається рівномірно й прямолінійно. Чи означає це, що перший закон Ньютона є наслідком другого?
- Яка різниця існує між поняттями “прискорення сили тяжіння” й “прискорення вільного падіння”?
- Що таке вага тіла? Від чого і як вона залежить? Чи можна сказати, що вага є властивістю тіла?
- Чи можна сказати, що невагомість - то є стан тіла, коли на нього не діє сила тяжіння?
- Чи діє сила тертя на тіло, що нерухомо лежить на горизонтальній площині? Похилій площині?
- Що є спільного та відмінного між силами сухого тертя та силами опору середовища?
3. НЕІНЕРЦІЙНІ СИСТЕМИ ВІДЛІКУ
Закони Ньютона виконуються тільки в інерціальних систем відліку. Але на практиці існує багато випадків, коли рух тіла доводиться розглядати відносно неінерційної
системи відліку, тобто такої, що рухається з прискоренням відносно інерційної. Тому постає питання, чи не можна якось пристосувати основне рівняння динаміки й для неінерційних систем відліку. Виявляється, що можна. Далі розглянуто, як саме.
3.1. Сили інерції
3.2. Сили інерції в обертовій системі відліку
3.3. Загальне рівняння руху точки в НСВ
3.4. Контрольні запитання
3.1. Сили інерції
Згадаймо наступну відому ситуацію. Знаходячись в автобусі, що рухається без прискорення, ми перебуваємо відносно автобуса в спокої і відчуваємо лише силу тяжіння. Але під час різкого гальмування або прискорення, чи при крутих поворотах якась інша сила відкидає нас уздовж або поперек руху. Ця сила виникає не тому, що на нас починають діяти якісь інші тіла, а тому, що автобус, який для пасажира є природною системою відліку, набуває прискорення відносно Землі, тобто стає неінерційною системою відліку.
Сили, що зумовлені не взаємодією між тілами, а властивостями системи відліку, називаються силами інерції.
Зауваження. Через те, що сили інерції не є зумовлені взаємодією між тілами, автори деяких підручників називають їх фіктивними.
Урахування сил інерції дозволяє поширити основне рівняння динаміки (3.5) або (3.7) і на неінерційні системи відліку.

Розглянемо сили інерції, що виникають при поступальному русі системи відліку. Нехай є дві системи відліку: нерухома інерціальна К-система й K′-система, яка рухається поступально з прискоренням \(\vec{a}_0 \) відносно К-системи вздовж її осі ОХ (рис.4.1). Якщо тіло рухається відносно К-системи зі швидкістю \(\vec{v} \), то його швидкість відносно K′-системи, згідно з (1.33),
|
\( \vec{v}^{\prime}=\vec{v}-\vec{V}, \) |
де \( \vec{V}\) - швидкість K′ -системи відносно К в дану мить. Звідси, відповідно до (1.6),
|
\( \vec{a}^{\prime}=\vec{a}-\vec{a_0},\) |
(4.1) |
де \( \vec{a}^{\prime}\) – прискорення тіла відносно неінерційної системи відліку K′, \( \vec{a}\) – його прискорення відносно інерціальної системи відліку К, \(\vec{a}_0 \) – прискорення K′- системи відліку відносно К. Домноживши вираз (4.1) на масу тіла т, одержимо
|
\( m\vec{a}^{\prime}=m\vec{a}-m\vec{a}_0 \). |
Величина \( m\vec{a}=\vec{F}\) – то є “звичайна” сила, що діє на тіло в інерційній системі відліку з боку інших тіл. Але прискорення тіла в K′-системі відліку визначається не тільки цією силою, а ще й величиною
|
\( \vec{F}_i=-m\vec{a}_0, \) |
(4.2) |
яка називається (поступальною) силою інерції. Ця сила зумовлена прискореним рухом K′-системи відліку, отже, вона не пов’язана із взаємодією даного тіла з іншими тілами. Тому для сили інерції третій закон Ньютона не виконується. Іншою характерною особливістю сили інерції є те, що вона визначається добутком маси тіла не на його прискорення, а на прискорення системи відліку.
Уведення сили інерції дозволяє поширити основне рівняння динаміки й на поступальні неінерціальні системи відліку:
|
\( m\vec{a}^{\prime}=\vec{F}+\vec{F}_i \), |
(4.3) |
де \(\vec{F} \) - рівнодійна сил, що діють на тіло з боку інших тіл і полів, \(\vec{F}_i \) - сила інерції.
3.2. Сили інерції в обертовій системі відліку
Розглянемо тепер неінерційну систему відліку K′, яка обертається зі сталою кутовою швидкістю \(\omega \) навколо осі нерухомої відносно інерційної системи відліку К. Кожна точка такої обертової системи відліку має відповідне доцентрове прискорення відносно осі обертання. Тому прискорення тіла в інерційній системі відліку К залежить не тільки від зміни швидкості, а й від його положення в системі K′.
Відцентрова сила. Спочатку розглянемо тіло нерухоме відносно обертової системи відліку.
|
|

Пов’яжемо систему відліку K′ із диском, який обертається з кутовою швидкістю \(\omega \) навколо осі О' О'', що є нерухомою в інерційній системі відліку К (рис 4.2). Нехай на поверхні диска на відстані r від його осі обертання лежить тіло, що прикріплене до осі ниткою. Тоді відносно системи відліку К тіло рухається по колу радіуса r із нормальним прискоренням \(\vec{a}= -\omega^2\vec{r}\), яке створюється силою натягу нитки \(\vec{F}\) (рис. 4.2а). За другим законом Ньютона \(\vec{F}= -m\omega^2\vec{r}\). Але відносно диска тіло є нерухомим, отже в системі відліку K′ його прискорення \(\vec{a}^{\prime}=0 \). Це означає, що в обертовій системі відліку на тіло, крім сили взаємодії \(\vec{F}\), діє ще й рівна їй за модулем і протилежна за напрямом сила інерції
|
\(\vec{F}\)вц = \(m\omega^{2}\vec{r}\). |
(4.4) |
|
|
|

Ця сила напрямлена від осі (центра) обертання системи відліку K′ (рис. 4.2б) і називається відцентровою силою. Саме відцентрову силу відчуває пасажир на поворотах.
Сила Коріоліса. Нехай тепер точка рухається відносно обертової системи відліку K′ із швидкістю \(\vec{v}^{\prime}\) (рис. 4.3). Тоді в інерційній К-системі відліку за час dt радіус-вектор \(\vec{r}\), який задає положення точки відносно осі обертання, набуде приросту
|
\(\mathrm{d}\vec{r}=\vec{v}^{\prime}\mathrm{d}t+\left[\mathrm{d}\vec{\varphi},\vec{r}\right]. \) |
(4.5) |
У цьому виразі перший доданок зумовлений рухом точки відносно K′-системи відліку, а другий – то є переміщення точки разом із K′-системою при її повороті на кут \(\mathrm{d}\vec{\varphi}\) відносно К-системи відліку (див. (2.1а)). Поділивши (4.5) на dt, одержимо:
|
\(\vec{v}=\vec{v}^{\prime}+\left[\vec{\omega},\vec{r}\right]. \) |
(4.5а) |
Суттєво, що \(\vec{v}\) залежить від \(\vec{r}\). Тому, навіть коли точка в обертовій системі відліку K′ рухається рівномірно (\(\vec{v}^{\prime}=\mathrm{const}\)), її швидкість відносно нерухомої К-системи відліку буде змінюватися внаслідок зміни відстані r до осі О'О''. Тому приріст вектора швидкості \(\mathrm{d}\vec{v}\) у К-системі визначається як зміною вектора відносної швидкості \(\mathrm{d}\vec{v}^{\prime}\), так і зміною радіуса-вектора \(\mathrm{d}\vec{r}\):
|
\(\mathrm{d}\vec{v}=\mathrm{d}\vec{v}^{\prime}+\left[\vec{\omega},\mathrm{d}\vec{r}\right]. \) |
(4.6) |
Підставивши в це співвідношення вираз (4.5), отримаємо:
|
\(\mathrm{d}\vec{v}=\mathrm{d}\vec{v}^{\prime}+\left[\vec{\omega},\vec{v}^{\prime}\right]\mathrm{d}t+\left[\vec{\omega}\left[\mathrm{d}\vec{\varphi},\vec{r}\right]\right] \) |
(4.7) |
Розглянемо тепер зміну вектора \(\vec{v}\) відносно системи відліку К. Навіть якщо швидкість тіла \(\vec{v}^{\prime}\) в обертовій системі відліку K′ є сталою, внаслідок повороту системи K′ на деякий кут \(\mathrm{d}\vec{\varphi}\) за час dt, вектор \(\vec{v}^{\prime}\) відносно К-системи відліку теж повернеться на кут \(\mathrm{d}\vec{\varphi}\) і отримає приріст \(\mathrm{d}\vec{v}^{\prime}=\vec{a}^{\prime}\mathrm{d}t+\left[\mathrm{d}\vec{\varphi},\vec{v}^{\prime}\right] \). Якщо ж тіло має відносно K′- системи відліку ще й прискорення \(\vec{a}^{\prime}\), то вектор \(\vec{v}^{\prime}\) набуває додаткового приросту \(\vec{a}^{\prime}\mathrm{d}t \). Тому в загальному випадку
|
\(\mathrm{d}\vec{v}=\vec{a}^{\prime}\mathrm{d}t+\left[\mathrm{d}\vec{\varphi},\vec{v}^{\prime}\right]. \) |
Підставивши цей вираз у (4.7) і поділивши на dt, отримаємо:
|
\(\vec{a}=\frac{\mathrm{d}\vec{v}}{\mathrm{d}t}=\vec{a}^{\prime}+2\left[\vec{ \omega},\vec{v}^{\prime}\right]+\left[\vec{\omega}\left[\vec{\omega},\vec{r}\right]\right]. \) |
Легко переконатися, що \(\left[\vec{\omega}\left[\vec{\omega},\vec{r}\right]\right]=-\omega^2\vec{r}\). Враховуючи також, що \(\left[\vec{v}^{\prime},\vec{\omega}\right]=-\left[\vec{\omega},\vec{v}^{\prime}\right]\), маємо:
|
\(\vec{a}^{\prime}=\vec{a}+2\left[\vec{v}^{\prime},\vec{\omega}\right]-\left[\vec{\omega}\left[\vec{\omega},\vec{r}\right]\right]. \) |
(4.8) |
Домноживши цей вираз на масу m точки, одержимо рівняння динаміки матеріальної точки в обертовій системі відліку:
|
\( m\vec{a}^{\prime}=m\vec{a}+2m\left[\vec{v}^{\prime},\omega\right]+m\omega^2\vec{r}. \) |
(4.9) |
або
|
\( m\vec{a}^{\prime}=\vec{F}+\vec{F}\)к + \(\vec{F}\)вц, |
(4.9а) |
де \(\vec{F}=m\vec{a}\) – сила взаємодії точки з іншими тілами, \(\vec{F}\)вц\( =m\omega^2\vec{r}\) – вже знайома відцентрова сила інерції. Але, як бачимо, на рухому точку в обертовій системі відліку діє ще одна сила інерції
|
\(\vec{F}\)К = \(2m[\vec{v}^{\prime},\vec{\omega}]\), |
(4.10) |
яка називається силою Коріоліса (або коріолісовою силою).
Характерною властивістю сили Коріоліса є те, що вона завжди діє перпендикулярно до напрямку руху тіла. Зокрема, при русі в меридіональному напрямку в північній півкулі вона напрямлена праворуч по ходу руху тіла, а у південній – ліворуч (рис. 4.4). З цим пов’язаний відомий ефект підмивання правих берегів річок у північній півкулі і лівих у південній. Також завдяки коріолісовій силі спостерігається обертання площини коливань математичного маятника. Саме це дозволило у свій час (1852 р.) французькому фізикові Фуко довести, що Земля обертається навколо своєї осі. Існують й інші прояви сил Коріоліса. Зокрема, при русі тіла вздовж паралелі сила Коріоліса має вертикальну складову, напрямлену вгору при русі на схід і вниз при русі на захід, що впливає на дальність польоту тіл і враховується в балістиці.
|
|

3.3. Загальне рівняння руху точки в НСВ
У кінематиці (Лекція 2, п. 2.1) говорилося про те, що довільний рух твердого тіла можна трактувати як сукупність поступального та обертального рухів. Тому в довільній неінерційній системі відліку на тіла, крім сил взаємодії, діють усі розглянуті види сил інерції. Відповідно, основні рівняння руху (3.5) і (3.7) у довільній НСВ мають вигляд:
|
\( m\vec{a}^{\prime}=\vec{F}-m\vec{a}_0+m\omega^2\vec{r}+2m\left[\vec{v}^{\prime},\vec{\omega}\right]\); |
(4.11) |
|
|
\( \frac{\mathrm{d}\vec{r}^{\prime}}{\mathrm{d}t^2}=\frac{\vec{F}}{m}-\vec{a}_0+\omega{\vec{r}}+2\left[\vec{v}^{\prime},\vec{\omega}\right], \) |
(4.12) |
де \(\vec{a}_0 \) і \(\vec{\omega} \) - поступальне прискорення та кутова швидкість системи відліку. Два інші доданки являють собою відцентрове прискорення
|
\(\vec{a}\)вц = \(\omega^{2}\vec{r}\) |
(4.13) |
та коріолісове прискорення
|
\(\vec{a}_к=2\left[\vec{v}^{\prime},\vec{\omega}\right] \). |
|
3.4. Контрольні запитання
1. Чи виконуються закони Ньютона в довільній системі відліку?
2. На горизонтальній платформі, що рівномірно рухається по прямій, лежить кулька. Але коли платформа починає рухатися прискорено, кулька теж починає з з таким самим прискоренням котитися по платформі. Як це пояснюється в системі відліку, пов’язаній із землею? із платформою?
3. Чим відрізняється основне рівняння руху тіла в неінерційній системі відліку від рівняння руху в інерційній системі відліку?
4. Чи скрізь напрям нитки виска збігається з точним напрямом до центра Землі?
5. Чи є різниця між поняттями “прискорення вільного падіння” та “прискорення сили тяжіння”?
6. В якому випадку коріолісова сила інерції, що діє на тіло на поверхні Землі, збігається за напрямом із відцентровою силою?
7. Чи можливо, щоби коріолісова сила, котра діє на тіло, що рухається на південь, теж була напрямлена на південь?
8. На екваторі роблять постріл із гармати один раз точно на північ, а другий - на південь. Що можна сказати про дальності польоту снарядів в обох випадках?
9. З однакової висоти роблять горизонтальний постріл із гармати точно на схід: один раз на екваторі, а інший - десь у північній півкулі. Чим будуть відрізнятися траєкторії снаряда?
4. ДИНАМІКА СИСТЕМ
На практиці найчастіше доводиться мати справу не з окремою частинкою (матеріальною точкою), а із системою, тобто з виділеною сукупністю частинок або тіл, які певним чином взаємодіють між собою та з іншими тілами, що не включені до складу системи. Останні звуться зовнішніми тілами[1]. Відразу наголосимо, що поділ тіл на тіла системи та зовнішні не є наперед заданим і визначається поставленими задачами. Аналогічно й сили, що діють на тіла, поділяють на внутрішні та зовнішні. При цьому, якщо на тіла системи не діють зовнішні сили, вона називається ізольованою, або замкненою.
Рух тіл системи формально визначається рівняннями другого закону Ньютона (3.3), в які входять усі зовнішні та внутрішні сили. При цьому внутрішні сили не є заданими, позаяк взаємне розташування та відносні швидкості тіл системи весь час змінюються. З цієї причини навіть для системи всього з трьох тіл рівняння руху (3.7) не мають точних розв’язків, не говорячи про складні системи, коли детальна інформація про сили взаємодії між тілами взагалі відсутня. Тому при дослідженні систем особливого значення набувають деякі величини, поведінка котрих не залежить від складу системи та внутрішніх взаємодій у ній. До таких, зокрема, відноситься імпульс.
Далі розглянуто:
4.1. Імпульс системи
4.2. Закон збереження імпульсу
4.3. Рух тіл змінної маси (рівняння Мещерського)
4.4. Центр мас
4.5. Контрольні запитання
4.1. Імпульс системи
Нагадаємо, що імпульсом системи називається адитивна величина, котра дорівнює сумі імпульсів усіх тіл системи:
\( \vec{P}=\sum_{i}\vec{p}_{i}=\sum_{i}m\vec{v}_{i}\).
|
|

Розглянемо поведінку імпульсу в найпростішій системі, що складається всього з двох матеріальних точок (частинок) 1 і 2, які взаємодіють із силами \(\vec{F}_{12} \) та \(\vec{F}_{21} \) і на які діють зовнішні сили \(\vec{F}_1 \) і \(\vec{F}_2 \) (рис. 5.1). Рух кожної частинки визначається рівнянням (3.3), отже зміна імпульсу системи виражається, як
\(\frac{\mathrm{d}\vec{P}}{\mathrm{d}t}\) = \(\sum_{i}\frac{\mathrm{d}\vec{p}_{i}}{\mathrm{d}t}=\frac{\mathrm{d}\vec{p}_{1}}{\mathrm{d}t}+\frac{\mathrm{d}\vec{p}_{2}}{\mathrm{d}t}=\vec{F}_{1}+\vec{F}_{12}+\vec{F}_{2}+\vec{F}_{21}\).
Але, згідно з третім законом Ньютона (3.6):
\(\vec{F}_{12}+\vec{F}_{21}=0 \).
Отже,
\( \frac{\mathrm{d}\vec{P}}{\mathrm{d}t}=\vec{F}_{1}+\vec{F}_{2}=\sum_{i}\vec{F}_{i}\).
У довільній системі співвідношення (3.6) виконується для будь-якої пари частинок. Тому отриманий результат зберігає чинність, так що
|
\(\frac{\mathrm{d}\vec{P}}{\mathrm{d}t}=\vec{F} \), |
(5.1) |
де величина \( \vec{F}=\sum_{i}\vec{F}_{i}\) є сумарною зовнішньою силою, що діє на тіла системи. (Зауважимо, що буквально вона не є “рівнодійною” за винятком ситуації, коли лінії дії всіх зовнішніх сил перетинаються в одній точці). Отож,
швидкість зміни імпульсу довільної системи дорівнює сумарній зовнішній силі, що діє на неї.
Це твердження й рівняння (5.1) інколи називають законом зміни імпульсу системи. Воно виражає той дуже важливий факт, що, на відміну від окремих частинок, імпульс усієї системи здатні змінювати лише зовнішні сили включно із силами інерції, що діють на тіла в неінерційних системах відліку.
Зміна імпульсу системи за скінчений проміжок часу \( [t_1,\,\,t_2] \) визначається повним імпульсом зовнішніх сил за цей проміжок:
|
\(\Delta\vec{P}=\int\limits_{t_1}^{t_2}\vec{F}\mathrm{d}t \). |
(5.1а) |
4.2. Закон збереження імпульсу
Якщо система замкнена (зовнішні сили \(\vec{F}_i \) відсутні), то в рівнянні (5.1) \(\vec{F}=0 \), отже
|
\( \frac{\mathrm{d}\vec{P}}{\mathrm{d}t}=0 \) \( \Rightarrow \) \(\vec{P}=\mathrm{const} \). |
(5.2) |
У цьому полягає закон збереження імпульсу:
імпульс замкненої системи зберігається, тобто залишається незмінним у часі.
При цьому імпульси окремих частинок системи можуть змінюватися внаслідок взаємодії між собою, але лише так, що імпульс системи лишається незмінним. Іншими словами, взаємодія між тілами призводить тільки до обміну імпульсами без зміни сумарного імпульсу. Тому рівняння (5.2) розгорнуто можна записати так:
|
\( {m}_{1}\vec{v}_{1}^{\prime}+m_{2}\vec{v}_{2}^{\prime}+...\) = \(m_{1}\vec{v}_{1}^{\prime\prime}+m_{2}\vec{v}_{2}^{\prime\prime}+...\) |
(5.2а) |
де ліва та права частини відносяться до двох довільних моментів часу.
З наведених міркувань і викладок можна зробити висновок, що закон збереження імпульсу є наслідком законів Ньютона, і така думка є цілком природньою. Але, як це нерідко буває в науці, наслідок може виявитися більш глибоким і загальним, ніж положення, із яких його отримано. І справді, закон збереження імпульсу є одним із небагатьох абсолютних фізичних законів. Він виконується не лише в механічних, а й у будь-яких ізольованих фізичних системах і за будь-яких умов. Наприклад, закон збереження імпульсу виконується в електромагнітних полях та у квантових системах, хоча і в першому, і в другому випадку закони Ньютона взагалі не є чинними. Це саме стосується й систем, в яких частинки рухаються із субсвітловими швидкостями. Така універсальність робить закон збереження імпульсу дуже важливим як для теорії, так і для практики. Зокрема, при розгляді маловивчених систем він дозволяє одразу відкидати всі гіпотетичні процеси, в яких не виконується умова (5.1).
Практична цінність закону збереження імпульсу визначається тим, що умова збереження імпульсу \( \vec{F}=0 \), може точно чи наближено виконуватись і в незамкнених системах. Це можливо у таких випадках.
1. Зовнішні сили є компенсованими. Так буває, наприклад, при зіткненні куль, які рухаються по гладкій горизонтальній поверхні.
2. В системі імпульси окремих тіл змінюються протягом невеликого проміжку часу під дією дуже великих внутрішніх сил, так що можна нехтувати зовнішніми силами, тобто вважати, що \(\vec{F}=0 \). Така ситуація, зокрема, спостерігається при розриві снарядів під дією величезних внутрішніх сил тиску порохових газів.
3. Якщо вектор сумарної зовнішньої сили \(\vec{F} \) має незмінний напрям, скажімо, вертикальний OY, то її проекція на будь-який горизонтальний напрям ОX \( F_x=0 \). Відповідно, зберігається проекція вектора імпульсу системи на цей напрям:
|
\( {P}_{x}=\sum_{i}p_{ix}=\mathrm{const}\) |
(5.3) |
4.3. Рух тіл змінної маси (рівняння Мещерського)
Одним з цікавих і важливих наслідків збереження імпульсу є виникнення так званої реактивної сили при зміні маси тіла внаслідок витоку або притоку речовини. Це відбувається, приміром, при русі автомобіля, що поливає вулицю, навантаженні (чи розвантаженні) платформи на ходу, русі ракети з увімкненими двигунами, тощо.
Знайдемо рівняння руху такого тіла на прикладі руху космічної ракети в процесі виходу на орбіту. Позначимо як m і \( \vec{v} \) масу ракети та її швидкість відносно Землі. Відповідно, імпульс ракети \(\vec{p}=m\vec{v}\). Якщо за час dt двигун ракети викидає масу продуктів згоряння палива \(\delta m\) зі швидкістю \( \vec{u} \) відносно ракети, то її маса змінюється на величину –\(\delta m\), а швидкість на \(\mathrm{d}\vec{v} \), й імпульс ракети стає рівним \(\left( m-\delta m \right)\left( \vec{v}+\delta \vec{v} \right)\). При цьому відносно Землі швидкість витоку продуктів згоряння масою \(\delta m\) дорівнює \(\vec{v}+\vec{u}\), а їхній імпульс \(\delta{m}(\vec{v}+\vec{u}) \). Отже, сумарний імпульс системи ракета-продукти згоряння набуває значення \(\left( m-\delta m \right)\left( \vec{v}+\delta \vec{v} \right)\)+\(\delta{m}(\vec{v}+\vec{u}) \), а його зміна за час dt складає
\( \left( m-\delta m \right)\left( \vec{v}+\delta \vec{v} \right)\)+\(\delta{m}(\vec{v}+\vec{u}) \)–\( m\vec{v}\).
Відтак, розкривши дужки та нехтуючи доданком \( \delta{m}\cdot\mathrm{d}\vec{v} \) (малою вищого порядку), одержимо
\( d\left( m\vec{v} \right)=md\vec{v}+\vec{u}dm\)
і
\( \frac{d\left( m\vec{v} \right)}{dt}=m\frac{d\vec{v}}{dt}+\vec{u}\frac{dm}{dt}\).
Ліва частина цього рівняння, згідно з виразом (5.1), дорівнює сумарній зовнішній силі \(\vec{F} \), яка діє на систему (в нашому випадку – це сила тяжіння, що діє на ракету та на викинуті гази). Тому, врахувавши, що \(\delta{m}= -\mathrm{d}m \) (спад маси ракети), отримаємо основне рівняння динаміки тіла змінної маси, яке називається рівнянням Мещерського:
|
\( \vec{F}=m\frac{d\vec{v}}{dt}-\vec{u}\frac{dm}{dt}\) \(\Rightarrow \) \( m\frac{d\vec{v}}{dt}=\vec{F}+\vec{u}\frac{dm}{dt}\) |
(5.4) |
У розглянутому прикладі зміна маси тіла (ракети) була зумовлена відокремленням речовини (витоком газів), отже dm < 0. Але рівняння Мещерського чинне й у випадку, коли речовина приєднується, наприклад, при завантаженні рухомої платформи піском (у цьому випадку dm > 0).
Рівняння (5.4) показує, що прискорення тіла змінної маси визначається не тільки зовнішньою силою \(\vec{F} \), а й величиною
|
\( \vec{F}_p=\vec{u}\frac{\mathrm{d}m}{\mathrm{d}t} \), |
(5.5) |
яку називають реактивною силою. Її величина визначається швидкістю зміни маси тіла (dm/dt), а напрям – характером зміни: якщо маса приєднується (dm/dt > 0), то \(\vec{F}_p \) за напрямом збігається з вектором відносної швидкості \(\vec{u} \), якщо ж маса відокремлюється (dm/dt < 0), то вектори \(\vec{F}_p \) та \(\vec{u} \) є антипаралельними. Зокрема, якщо продукти згоряння палива вилітають із сопла ракети вертикально вниз, то реактивна сила напрямлена вертикально вгору, що й забезпечує підйом ракети.
4.4. Центр мас
На загал у будь-якій системі окремі частинки (або тіла) рухаються з різними за модулем і напрямом швидкостями. Тому вираз загального імпульсу системи через імпульси окремих частинок
| $\vec{P}=\sum\limits_{i}{{{m}_{i}}}{{\vec{v}}_{i}}$ |
не дає картини рухуу системи як цілого. Проте це відображує жорстко зв'язана із системою точка, що називається центром мас і в багатьох задачах дозволяє розглядати механічну систему як одну матеріальну точку.
Положення та рух центра мас. Положення центра мас після елементарних перетворень можна виразити через розташування та маси точок, замінивши у виразі імпульсу системи швидкості похідними радіус-векторів:
|
\(\vec{P}=\sum_{i}m_{i}\vec{v}_{i}=\sum_{i}m_{i}\vec{r}_{i}^{\prime}=\left(\sum_{i}m_{i}\vec{r}_{i}^{\prime}\right)^{\prime} =\sum\limits_{i}m_{i}\left(\frac{\sum\limits_{i}m_{i}\vec{r}_{i}}{\sum\limits_{i}m_{i}}\right)^{\prime}=m\left(\frac{\sum\limits_{i}m_{i}\vec{r}_{i}}{\sum\limits_{i}m_{i}}\right)\), де \(m=\sum_{i}m_{i}\) – загальна маса системи. |
(5.6) |
|
|
|

Величина під знаком похідної у двох останніх виразах являє собою вектор із початком у початку відліку О, тобто, є радіусом-вектором \(\vec{r}_c \) певної точки С, яка й називається центром мас системи.
Для найпростішої системи з двох матеріальних точок положення цента мас C можна визначити графічно, як показано Рис. 5.2. ілюструє графічне визначення радіуса-вектора \(\vec{r}_c \) і розташування цієї точки для системи з двох тіл із масами m1 та m2 = 2 m1.
Отже, за означенням центр мас – то є точка, положення котрої визначається радіусом-вектором
|
\(\vec{r}_{c}=\frac{\sum\limits_{i}m_{i}\vec{r}_{i}}{\sum\limits_{i}m_{i}}=\frac{\sum\limits_{i}m_{i}\vec{r}_{i}}{m}\). |
(5.7) |
Відповідно, координати центра мас визначаються як
|
\(X_{c}=\frac{\sum\limits_{i}m_{i}x_{i}}{\sum\limits_{i}m_{i}}=\frac{\sum\limits_{i}m_{i}x_{i}}{m}\), \(Y_{c}=\frac{\sum\limits_{i}m_{i}y_{i}}{\sum\limits_{i}m_{i}}=\frac{\sum\limits_{i}m_{i}y_{i}}{m}\), \(Z_{c}=\frac{\sum\limits_{i}m_{i}z_{i}}{\sum\limits_{i}m_{i}}=\frac{\sum\limits_{i}m_{i}z_{i}}{m}\). |
(5.7а) |
Відтак вираз імпльсу системи (5.6) набуває вигляду:
|
\(\vec{P}=m\vec{V}_c \), |
(5.8) |
де \({{\vec{V}}_{c}}={{{\vec{r}}'}_{c}}\) – швидкість центра мас системи, яка визначається через швидкості окремих частинок системи як
|
\(\vec{V}_{c}=\frac{\sum\limits_{i}m_{i}\vec{v}_{i}}{m}\). |
(5.9) |
Підставивши вираз (5.8) у закон зміни імпульсу системи (5.1), отримаємо рівняння руху центра мас:
|
\( m\frac{d{{{\vec{v}}}_{c}}}{dt}=\vec{F}\), або \( m{{a}_{c}}=\vec{F}\). |
центр мас довільної системи рухається, як точка, в якій зосереджена вся маса системи і до якої прикладені всі зовнішні сили, що діють на тіла системи.
Це твердження називають теоремою про рух центра мас.
Система відліку центра мас (Ц-система). З теореми про рух центра мас випливає, що, коли нас не цікавлять відносні рухи частинок системи, її можна розглядати як одну частинку з масою всієї системи, що розміщена в центрі мас і рухається під дією всіх зовнішніх сил, які діють на систему. Але поняття центра мас виявляється корисним і при розгляді рухів частинок усередині системи. Для цього з центром мас пов’язують систему відліку, яка називається системою відліку центра мас, або коротко – Ц-системою відліку. Очевидно, що в Ц-системі відліку центр мас є нерухомим, отож імпульс системи (величини, що визначені в Ц-системі відліку, будемо помічати позначкою ~, яка називається тильда)
\(\tilde{\vec{P}}=\sum\limits_{i}\tilde{\vec{p}}_{i}=0\).
Інакше кажучи, будь-яка система тіл є нерухомою у своїй власній Ц-системі відліку. Ця обставина істотно полегшує розгляд багатьох процесів, зокрема, зіткнень між частинками. Наприклад, для системи з двох частинок
|
\(\tilde{\vec{p}}_{1}+\tilde{\vec{p}}_{2}=0\) \(\Rightarrow\) \(\tilde{\vec{p}}_{1}=-\tilde{\vec{p}}_{2}\), |
(5.11) |
тобто, в Ц-системі відліку двох частинок вони завжди мають однакові за величиною й протилежні за напрямом імпульси.
Така симетричність рухів є дуже зручною, зокрема, при розгляді зіткнень між частинками. Приміром, якщо дві частинки стикаються непружно (“злипаються”), то в Ц-системі вони зупиняються, отже в К-системі їхня швидкість після зіткнення \( \vec{u}=\vec{V}_c \) i визначається виразом (5.9).
Наостанку зауважимо, що Ц-система відліку незамкненої системи тіл є неінерціальною, оскільки \({{\vec{a}}_{c}}\ne 0\) (див. рівняння (5.10)). Але
Ц-система відліку замкненої системи тіл завжди є інерціальною.
4.5. Контрольні запитання
2. Чи змінюється імпульс при рівномірному русі тіла?
3. Чи однакове значення має імпульс тіла або системи тіл у різних інерціальних системах відліку? Зміна імпульсу?
4. Що таке ізольована система? Чи існують у природі строго ізольовані системи?
5. Які сили в системі частинок називаються внутрішніми та які – зовнішніми?
6. Від чого залежить зміна імпульсу системи з часом?
7. У чому полягає закон збереження імпульсу? Яке його значення?
8. Чи можна використовувати закон збереження імпульсу для неізольованих систем? Наведіть приклади.
9. Як виглядає та як записується рівняння Мещерського?
10. Що таке реактивна сила та реактивний рух? Наведіть приклади.
11. Чому при пострілі з рушниці треба щільно притискати її до плеча?
12. Від чого залежить сила тяги реактивного двигуна?
13. Якими формулами визначається положення центра мас системи?
14. Який зв’язок існує між імпульсом системи та рухом її центра мас?
15. Як записується та формулюється теорема про рух центра мас системи?
16. Як визначаються швидкості та імпульси двох частинок у їх Ц - системі відліку?
5. РОБОТА ТА ЕНЕРГІЯ
Для різних класів фізичних систем існують свої специфічні поняття та величини, що характеризують властивості об’єктів та процеси саме в таких системах. Наприклад, прискорення є суто механічною, температура – термодинамічною, а освітленість – оптичною величиною. І лише одна фізична величина однаково притаманна всім фізичним системам і є універсальною характеристикою їх стану та процесів у них. Ця величина називається терміном енергія, від грецького energia, що означає дію, або ж діяльність. Енергія має дві визначальні властивості. По-перше, на відміну від інших величин, існують різні форми енергії: механічна, внутрішня (теплова), електромагнітна, ядерна, тощо. І, по-друге, енергія має здатність переходити з одних форм в інші, причому завжди так, що загальна кількість енергії у Природі лишається незмінною (закон збереження енергії).
Рух та взаємодія тіл характеризуються механічною енергією. При цьому існує спеціальна величина, що є кількісною мірою перетворень механічної енергії - механічна робота, або інакше робота сили.
Далі розглянуті наступні питання:
5.1. Робота та потужність сили
5.2. Кінетична енергія
5.3. Потенціальна енергія
5.4. Закон збереження механічної енергії
5.5. Зіткнення
5.6. Контрольні запитання
5.1. Робота та потужність сили
Елементарною роботою \(\delta A\) сили \(\vec{F} \) на нескінченно малому переміщенні \(\mathrm{d}\vec{s} \) називається скалярний добуток зазначених векторів:
|
\(\delta{A}=\vec{F}\mathrm{d}\vec{s}=F\mathrm{d}s\cos\alpha=F_s\mathrm{d}s \). |
(6.1) |
У цій формулі \(\mathrm{d}s=|\mathrm{d}\vec{s}| \) – елементарний шлях, \( F_s=F\cos\alpha \) – проекція вектора сили на напрям вектора переміщення, \(\alpha \) - кут між векторами \(\vec{F} \) і \(\mathrm{d}\vec{s}\) (рис.6.1). Елементарна робота позначається символом \(\delta A\), а не dA, тому що вона є малою кількістю роботи, а не її зміною (приростом); поняття “зміна (приріст) роботи” позбавлене змісту.
З означення (6.1) можна сказати, що робота є мірою дії сили на заданому переміщенні (шляху).
|
|

З означення (6.1) випливає, що робота є величиною алгебраїчною, тобто може мати той, чи інший знак, залежно від знаку cosα. Зокрема, коли \(\alpha \) > 90°, робота сили від’ємна. Інакше говорячи, від’ємну роботу виконує сила, що напрямлена проти переміщення, отже, спричинює гальмівну дію. Зрозуміло, що в цьому випадку переміщення тіла здійснюється або за рахунок якоїсь іншої сили, або за рахунок інерції руху. Тому буває зручно замість від’ємної роботи \(\delta A\) розглядати роботу проти даної гальмівної сили, – додатню величину \(\delta A\)′ = - \(\delta A\). Якщо сила перпендикулярна до переміщення, то вона роботи не виконує (cos90° = 0).
Робота є адитивною величиною. Дослід свідчить, що при переміщенні тіла по траєкторії на скінчену відстань робота сили на всій траєкторії дорівнює сумі робіт, які вона виконує на всіх ділянках траєкторії. Тому робота при переміщенні тіла по траєкторії із заданої точки 1 у задану точку 2 у загальному випадку визначається як криволінійний інтеграл від виразу (6.1):
|
\( A=\int\limits_1^2\vec{F}\mathrm{d}\vec{s}=\int\limits_1^2 F_s \mathrm{d}s \). |
(6.2) |
Криволінійний інтеграл відрізняється від звичайного тим, що додаються не добутки значень функції на приріст аргументу, а добутки значень вектора сили на нескінченно малі переміщення тіла вздовж певної лінії – траєкторії руху тіла. Відповідно символи в позначенні інтеграла (границі інтегрування) – то не числа, а позначення початкової та кінцевої точок на траєкторії, вдовж якої обчислюється даний криволінійний інтеграл.
Ураховуючи геометричний зміст інтеграла, роботу можна знаходити з графіка залежності \( F_s\mathrm{d}s \): площа під відповідною його ділянкою (заштрихована на рис. 6.2) чисельно дорівнює виконаній роботі.
Окрім того, робота рівнодійної декількох сил на даному переміщенні дорівнює сумі робіт кожної з них – це безпосередньо випливає з виразів (6.2) і (3.1):
|
\( A=\int\limits_1^2\vec{F}\mathrm{d}\vec{s}=\int\limits_1^2\left(\vec{F}_1+\vec{F}_2+...\right)\mathrm{d}\vec{s}=\int\limits_1^2\vec{F}_1\mathrm{d}\vec{s}+\int\limits_1^2\vec{F}_2\mathrm{d}\vec{s}+...= \) \(A=A_{1}+A_{2}+...=\sum\limits_{i}A_{i}\). |
(6.3) |
При русі вздовж прямої під дією сталої за величиною й напрямом сили, що діє під кутом \(\alpha \) до напрямку руху, величина Fs = F cosα = const, і вираз (6.2) дає:
|
\( A=\int\limits_1^2 F_s\mathrm{d}s=F_s\int\limits_1^2\mathrm{d}s=F_s{s}\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\,A=Fs\cos\alpha \). |
(6.4) |
Якщо сила діє в напрямку руху (\(\alpha \) = 0), то A = Fs. На основі цього встановлена одиниця роботи джоуль (Дж): 1 Дж = 1 Н·м.
Потужність. З практики добре відомо, що ефективність механізмів і машин (наприклад, двигунів) визначається не стільки величиною виконуваної роботи, скільки тим, як швидко вони здатні її виконувати. Інтенсивність виконання роботи характеризується потужністю. Потужність визначається величиною роботи за одиницю часу й вимірюється у ватах (Вт): 1 Вт = 1 Дж/с. Якщо інтенсивність виконання роботи змінюється з часом, то розрізняють середню та миттєву потужності.
Середня потужність – це відношення роботи А, виконаної за проміжок часу t, до його величини:
|
\(\langle P\rangle=\frac{A}{t} \). |
(6.5) |
Миттєва потужність характеризує інтенсивність виконання роботи в кожен момент часу й визначається виразом:
|
\( P=\frac{\delta{A}}{\mathrm{d}t} \), |
(6.5а) |
тобто – це відношенням елементарної роботи \(\delta A\) до нескінченно малого проміжку часу dt, за який вона виконується. Урахувавши, що \(\delta{A}=\vec{F}\mathrm{d}\vec{s} \) і \(\mathrm{d}\vec{s}/\mathrm{d}t \) – миттєва швидкість, одержимо
|
\( P=\vec{F}\cdot\vec{v}=Fv\cos\alpha \), |
(6.6) |
де \(\alpha \) - кут між векторами \(\vec{F}\) та \(\vec{v}\).
Очевидно, що потужність сили є алгебраїчною величиною, знак якої збігається із знаком роботи цієї сили.
5.2. Кінетична енергія
Теорема про кінетичну енергію. Позаяк при русі частинки під дією сили змінюється її швидкість, існує зв’язок між механічною роботою та станом руху частинки. Розглянемо роботу сумарної (рівнодійної) сили \(\vec{F}\), яка діє на частинку маси m, на елементарному переміщенні \(\mathrm{d}\vec{s}\) по довільній траєкторії (формула (6.1)):
\(\delta{A}=\vec{F}\mathrm{d}\vec{s}\).
Урахувавши, що \(\vec{F}=m\frac{\mathrm{d}\vec{v}}{\mathrm{d}t}\) і \(\mathrm{d}\vec{s}=\vec{v}\mathrm{d}t \) (\(\vec{v} \) – швидкість частинки), отримаємо:
\(\delta{A}=m\frac{\mathrm{d}\vec{v}}{\mathrm{d}t}\vec{v}\mathrm{d}\vec{v}=m\vec{v}\mathrm{d}\vec{v} \).
|
|

У загальному випадку вектори \(\vec{v}\) і \(\mathrm{d}{\vec{v}}\) не збігаються за напрямом (рис. 6.3), тому
\(\vec{v}\mathrm{d}\vec{v}=v|\mathrm{d}\vec{v}|\cos\alpha=v\mathrm{d}v \).
Цей результат є однією з важливих тотожностей векторної алгебри:
скалярний добуток вектора на його зміну дорівнює добутку модуля цього вектора на зміну його модуля).Отже, елементарна робота
\(\delta{A}=mv\mathrm{d}v=\mathrm{d}\left(\frac{mv^2}{2}\right) \).
Бачимо, що елементарна робота дорівнює приросту (зміні) величини
|
\( K=\frac{mv^2}{2} \). |
(6.7) |
Через імпульс тіла p = mv вона визначається, як
|
\( K=\frac{p^2}{2m} \). |
(6.7а) |
Величина К називається кінетичною енергією частинки. Очевидно, що вона вимірюється у джоулях (Дж).
Таким чином, маємо:
|
\(\delta{A}=\mathrm{d}K \). |
(6.8) |
Проінтегрувавши це співвідношення уздовж траєкторії від початкової точки 1 до кінцевої точки 2, дістанемо для довільного скінченого переміщення частинки:
|
\( A=K_2-K_1 \) або \( A=\Delta{K} \). |
(6.8а) |
Отримані співвідношення (6.8) і (6.8а) виражають теорему про кінетичну енергію:
зміна кінетичної енергії частинки на будь-якому переміщенні дорівнює роботі всіх сил, які діють на частинку на цьому переміщенні.
Слід наголосити на тому, що співвідношення (6.8) і (6.8а), які виражають зв’язок між роботою та кінетичною енергією, є універсальними – вони не залежать від природи та походження сил, які діють на частинку. Зокрема, в неінерціальних системах відліку величина \(\vec{F} \) включає й сили інерції. Але при цьому не слід забувати, що йдеться про роботу рівнодійної, тобто, про сумарну роботу всіх сил. Наприклад, коли ми рівномірно тягнемо санки за мотузку, то виконуємо роботу, проте кінетична енергія санок не змінюється. Але це зовсім не суперечить теоремі про кінетичну енергію, бо таку саму по модулю від’ємну роботу виконують сили тертя, і повна робота всіх сил дорівнює нулю.
Кінетична енергія системи. Розглянемо тепер зв’язок між роботою й станом руху для довільної системи частинок. Оскільки робота є адитивною величиною, повна робота всіх сил, що діють у системі, дорівнює сумі робіт \( A_i \), які виконуються силами, що діють на кожну частинку системи. Тому, враховуючи співвідношення (6.8) і (6.3), маємо:
\(\delta{A}=\sum\limits_{i}\delta{A}_{i}=\sum\limits_{i}\mathrm{d}K_{i}=\mathrm{d}\left(\sum\limits_{i}K_{i}\right)=\mathrm{d}K\),
де величина
|
\(K=\sum\limits_{i}K_{i}=\sum\limits_{i}\frac{m_{i}v_{i}^{2}}{2}=\sum\limits_{i}\frac{p_{i}^{2}}{2m_{i}}\). |
\(6.9) |
Кінетична енергія системи, котра, як видно, теж є адитивною величиною.
Отже, універсальний зв’язок між кінетичною енергією та роботою сил (6.8) і (6.8а) – теорема про кінетичну енергію – є чинною для довільної системи.
5.3. Потенціальна енергія
Потенціальні поля та консервативні сили
область простору, в усіх точках якої на частинку діє визначена сила певної природи, називається полем сил, або силовим полем.
У загальному випадку сили поля можуть змінюватися з часом, але ми будемо розглядати лише стаціонарні поля, тобто такі, сили котрих не залежать від часу. Прикладом стаціонарного поля може бути гравітаційне поле Сонця, сили якого визначаються законом всесвітнього тяжіння (3.8), або поле сил тяжіння біля поверхні планети (формула (3.9)). Можна також говорити про поле сил пружності, що виникають при розтягу закріпленого одним кінцем еластичного шнура, електричне поле, що створюється нерухомими зарядами, тощо.
Робота сил однорідного та центрального поля. Найпростішим є однорідне силове поле, тобто поле, в усіх точках якого на частинку діє однакова за величиною й напрямом сила \(\vec{F}=\mathrm{const} \). Розглянемо роботу такої сили при переміщенні частинки від точки 1 до точки 2 по довільній траєкторії (рис. 6.4). Зваживши на сталість сили, із загального виразу (6.2) отримаємо:
\( A=\int\limits_1^2\vec{F}\mathrm{d}\vec{s}=\vec{F}\int\limits_1^2\mathrm{d}\vec{s} \).
|
|

Інтеграл в останньому виразі є сумою низки елементарних векторів \(\mathrm{d}\vec{s}\) розміщених на траєкторії. За правилом додавання векторів ця сума являє собою вектор переміщення \(\vec{S}\) частинки від точки 1 до точки 2: \(\int\limits_1^2\mathrm{d}\vec{s}=\vec{S}\). Отже, робота
|
\( A=\vec{F}\cdot\vec{S}=FS\cos\alpha=FS_{F} \), |
(6.10) |
де SF – проекція вектора \(\vec{S}\) на напрям сили.
Очевидно, що вектор \(\vec{S}\) не залежить від форми траєкторії, що з’єднує точки 1 і 2. Отже,
робота сил однорідного поля при переміщенні частинки не залежить від траєкторії і визначається тільки початковим та кінцевим положенням частинки.
Аналогічну властивість має й робота сил центрального поля. Центральним називається таке силове поле, в будь-якій точці котрого на частинку діє сила, напрям якої проходить через одну й ту саму точку О ("силовий центр"), а величина залежить тільки від відстані до цієї точки (рис. 6.5). Тому, для будь-якої центральної сили можна записати загальний вираз:
|
\(\vec{F}=F_r(r)\vec{e}_r \), |
(6.11) |
де \(\vec{e}_r \) – орт (одиничний вектор), який указує напрям радіуса-вектора \(\vec{r}\) частинки відносно силового центра, \( F_r(r) \) – проекція сили на напрям \(\vec{r}\), \( r=|\vec{r}|\) – відстань від частинки до силового центра.
|
|

З урахуванням (6.11) і (6.2), для роботи центральної сили при переміщенні частинки по довільній траєкторії від точки 1 до точки 2 (рис. 6.6) маємо:
\( A=\int\limits_1^2\vec{F}\mathrm{d}\vec{s}=\int\limits_1^2F_r (r)\vec{e}_r\mathrm{d}\vec{s}=\int\limits_1^2 F_r (r)\mathrm{d}s\cdot\cos\alpha \).
З рис.6.6 видно, що величина ds·cosα дорівнює dr – зміні відстані частинки до силового центра, отже
|
\( A=\int\limits_1^2 F_r (r)\mathrm{d}r \). |
(6.12) |
Прикметно, що в цьому виразі фігурує не радіус-вектор частинки \(\vec{r}\), який визначає її положення на траєкторії, а лише відстань r від частинки до силового центра. Це означає, що
робота центральної сили теж не залежить від траєкторії руху частинки.
Консервативні, неконсервативні та дисипативні сили. Розглянуті вище типи сил мають одну й ту саму особливість – незалежність роботи від траєкторії. Тому вони мають спільну загальну назву – “консервативні сили”. Отже,
консервативними силами називаються такі, робота котрих не залежить від траєкторії руху частинки і визначається тільки її початковим та кінцевим положенням.
Оскільки при переміщенні частинки по будь-якій замкненій траєкторії її початкове й кінцеве положення збігаються,
робота консервативних сил на замкненій траєкторії дорівнює нулю.
Це твердження також можна розглядати як означення поняття “консервативні сили”. Конкретними прикладами консервативних сил у механіці є гравітаційна сила (3.8) і сила тяжіння (3.9), сила пружності (3.10). Поля, в яких діють консервативні сили, теж мають спеціальну назву – потенціальні поля (тому консервативні сили іноді теж називають потенціальними силами).
|
|

Не всі сили є консервативними, тому всі інші називають неконсервативними силами. Розглянемо, наприклад, роботу сили тертя \(\vec{F}\)т при переміщенні бруска маси m по горизонтальній поверхні з коефіцієнтом тертя μ під дією деякої сили \(\vec{F}\) (рис. 6.7). Сила тертя в кожній точці траєкторії напрямлена протилежно до переміщення і в даному випадку має модуль Fт = μmg. Тож її робота на будь-якій ділянці траєкторії дорівнює:
\( A=-\mu{mg}\int\limits_1^2\mathrm{d}s=-\mu{mgs}\),
де s – пройдений шлях. Зокрема, при русі по замкненій траєкторії s дорівнює довжині траєкторії. Отже, неконсервативність сили тертя є очевидною. Те саме стосується й сили \(\vec{F}\), яка забезпечує рух бруска.
Серед усіх неконсервативних сил вирізняють так звані гіроскопічні та дисипативні сили. Гіроскопічними називають сили, котрі весь час напрямлені перпендикулярно до переміщення частинки, через що взагалі не виконують роботи. Так, гіроскопічними є: сила, що діє на рухомий заряд у магнітному полі (сила Лоренца), сила нормальної реакції опори, коріолісова сила інерції (4.10), тощо.
До дисипативних сил відносяться різні сили тертя та опору. Характерною властивістю таких сил є те, що вони завжди є протилежними до напрямків відносних швидкостей взаємодіючих тіл.
|
|

Сказане, одначе, не стосується швидкостей руху тіл у заданій системі відліку, тому робота окремих дисипативних сил може бути як від’ємною, так і додатньою. Наприклад, якщо по дошці, що знаходиться на гладкій поверхні, тягти з тертям невеликий брусок (рис. 6.8), то буде рухатися й дошка. При цьому сила тертя \(\vec{F}\)т2, що забезпечує рух дошки, виконує додатню роботу. Але сумарна робота всіх дисипативних сил взаємодії між частинками будь-якої системи завжди є від’ємною. Доведемо це. Нехай між двома частинками 1 і 2 діють дисипативні сили \(\vec{F}_1 \) і \(\vec{F}_2 \) (рис. 6.9), що задовольняють третій закон Ньютона: \(\vec{F}_2=-\vec{F}_1 \). В обраній системі відліку з початком у точці О частинки в даний момент часу знаходяться в точках \(\vec{r}_1,\,\,\,\vec{r}_2 \) і мають швидкості \(\vec{v}_1,\,\,\,\vec{v}_2 \). За елементарний проміжок часу dt частинки здійснюють переміщення \(\mathrm{d}\vec{r}_1=\vec{v}_1\mathrm{d}t \) і \(\mathrm{d}\vec{r}_2=\vec{v}_{2}\mathrm{d}t \) (на рисунку не показані), тож дисипативні сили виконують роботу
\(\delta{A}\)дис = \(\vec{F}_1\mathrm{d}\vec{r}_1+\vec{F}_2\mathrm{d}\vec{r}_2=\vec{F}_1\left(\vec{v}_1-\vec{v}_2\right)\mathrm{d}t=\vec{F}_1\vec{v}_{12}\mathrm{d}t \),
де, згідно з (1.33), \(\vec{v}_{12}\) – швидкість руху першої частинки відносно другої (відносна швидкість). Оскільки сила \(\vec{F}_1 \) є дисипативною, вона напрямлена протилежно до вектора \(\vec{v}_{12}\), отже|
\(\delta{A}\)дис = \(-F_1v_{12}\mathrm{d}t=-F_1|\mathrm{d}\vec{r}_{12}|<0 \). |
(6.13) |
Якщо сила взаємодії стала, то
|
\( A \)дис = \(-F_1 |\vec{r}_{12}| \). |
(6.13а) |
Таким чином, за будь-яких умов
сумарна робота дисипативних сил взаємодії між двома частинками є від’ємною і визначається не переміщенням кожної частинки окремо, а лише їхнім відносним переміщенням.
Очевидно, що цей висновок є чинним і для довільної системи частинок.
Робота сили тяжіння. Біля поверхні планети сила тяжіння напрямлена вертикально вниз і є однорідною: \( m\vec{g}=\mathrm{const} \) (рис. 6.10). Тому її робота при переміщенні частинки з точки 1 у точку 2 по будь-якій траєкторії, згідно з (6.10), визначається як
|
\( A=mg\cdot s\cos\alpha=mg\left(z_1-z_2\right) \) \(\Rightarrow \) \( {A}=mg{{z}_{1}}-mg{{z}_{1}}\) |
(6.14) |
де z1 і z2 – початкова та кінцева вертикальна координата частинки.
|
|

Робота гравітаційної сили. Із закону всесвітнього тяжіння (3.8) випливає, що сила \(\vec{F}\), яка діє на будь-яке тіло m (наприклад, комету) в гравітаційному полі іншого тіла М (приміром, Сонця), є центральною (рис. 6.11). Проекція сили \(\vec{F}\) на напрям радіуса-вектора тіла \(\vec{r}\) дорівнює Fr = –GMm/r2, тому, згідно з (6.12), її робота при переміщенні тіла від точки 1 до точки 2 по довільній траєкторії дорівнює
|
\( A=\int\limits_1^2F_r(r)\mathrm{d}r=-GMm\int\limits_1^2\frac{\mathrm{d}r}{r_2}\,\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\, A=-G\frac{Mm}{r_1}-\left(-G\frac{Mm}{r_2}\right) \). |
(6.15) |
Робота пружної сили. Робота пружної сили \(\vec{F}\) при переміщенні вільного кінця еластичного шнура (або пружини) по довільній траєкторії (рис. 6.12) визначається аналогічно. Якщо позначити через l0 довжину недеформованого шнура і через Δl = l - l0 величину його деформації (розтягу), то вектор пружної сили, що діє на незакріплений кінець, згідно з (3.10), можна записати як \(\vec{F}=-\vec{e}_r k\Delta{l}\), де k – жорсткість шнура, \(\vec{e}_r \) – орт (одиничний вектор), який вказує напрям радіуса-вектора вільного кінця шнура. В такому разі, згідно з (6.12), отримуємо:
|
\( A=\int\limits_1^2F_r(r)\mathrm{d}r=-k\int\limits_1^2\Delta{l}\cdot\mathrm{d}(\Delta{l})\,\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\, A=\frac{k\Delta{l_1^2}}{2}-\frac{l\Delta{l_2^2}}{2} \) |
(6.16) |
Тут враховано, що проекція сили Fr = -kΔl визначається величиною деформації Δl шнура, а зміна відстані від вільного кінця шнура до точки О — зміною цієї величини: dr =d(Δl) .
Потенціальна енергія частинки.
Усі три розглянуті вище консервативні сили утворюють відповідні силові поля. При цьому з виразів (6.14) – (6.16) випливає, що в кожному випадку існує певна фізична величина U, пов’язана з роботою сил співвідношенням:
|
\( A=U_1-U_2 \), |
(6.17) |
або, для елементарних переміщень,
|
\(\delta{A}=-\mathrm{d}U \). |
(6.17а) |
Така величина U називається потенціальною енергією (cаме тому поля консервативних сил називають потенціальними). Тобто,
потенціальною енергією називається величина, спад якої при переміщенні частинки з однієї точки в іншу дорівнює роботі, котра виконується консервативними силами, що діють на частинку.
(Спадом називають різницю між початковим і кінцевим значенням змінної величини; спад дорівнює взятому з протилежним знаком приростові (зміні) величини. Слід також зазначити, що терміни “приріст” і “спад” не слід трактувати дослівно, як “збільшення” і “зменшення”, адже кожна з цих величин, залежно від умов, може виявитись як додатньою, так і від’ємною).
Порівнюючи вираз (6.17) із виразами (6.14) – (6.16), можна дійти висновку, що потенціальна енергія частинки, котра перебуває під дією сил тяжіння, гравітації, або пружності визначається, відповідно, такими формулами:
|
\( U=mgz \), |
(6.18) |
|
|
\( U=-G\frac{Mm}{r}\), |
(6.19) |
|
|
\( U=\frac{k\Delta{l^2}}{2}\). |
(6.20) |
Ці формули й справді є загальновживаними. Але слід зазначити, що жодне зі співвідношень (6.14) – (6.17а) не зміниться, якщо до отриманої з формул (6.18) – (6.20) величини U додати довільне число. Тож однозначно визначеною є не сама потенціальна енергія, лише її зміна ΔU при переміщенні частинки між якимось двома точками. Що ж до значення самої величини U, то його можна вказати тільки по відношенню до заздалегідь обраного нульового рівня, тобто точки (або множини точок), де потенціальна енергія приймається рівною нулю. Це добре видно з формули (6.18), в якій величина z (вертикальна координата) безпосередньо залежить від вибору початку відліку. Так само формула (6.19) визначає гравітаційну потенціальну енергію не взагалі, а по відношенню до нескінченно віддалених точок (адже U = 0 при r → ∞), а формула (6.20) показує, що пружна потенціальна енергія приймається рівною нулю, коли Δl = 0, тобто, за відсутності деформаціїй. Указаний вибір нульових рівнів є природнім, але не обов’язковим. Наприклад, легко показати, що формули (6.18) і (6.19), виражають одну й ту саму енергію – потенціальну енергію тіла в гравітаційному полі, – але по відношенню до різних нульових рівнів. Справді, роботу гравітаційної сили при переміщенні тіла біля поверхні Землі можна обчислювати за загальною формулою (6.15):
\( A=-G\frac{mM}{r_1}-\left(-G\frac{mM}{r_2}\right)=GmM\left(\frac{1}{r_2}-\frac{1}{r_1}\right)=\frac{GmM(r_1-r_2)}{r_1 r_2}\),
де m і M – відповідно, маса тіла та Землі, r1 і r2 – відстань від тіла до центра Землі в його початковому та кінцевому положенні. Але, якщо записати r = R + z (R – радіус Землі, z – вертикальна координата тіла, відрахована від земної поверхні), і врахувати, що біля поверхні з великою точністю r1·r2 = R2, отримаємо:\( A=\frac{GmM}{R^2}\cdot(z_1-z_2)=mgz_1-mgz_2 \)
де враховані формули (3.9) і (3.10).
Цей результат збігається з виразом (6.14) і випливає з (6.15) як наслідок зміни вибору нульового рівня потенціальної енергії. Так само при розгляді коливань тягарця підвішеного на пружині за нульовий рівень потенціальної енергії пружини зручніше прийняти положення статичної рівноваги тягарця, коли пружина має деформацію, спричинену його вагою.
Особливість потенціальної енергії полягає також у тому, що вона, на відміну від кінетичної, є величиною алгебраїчною, тобто може бути як додатньою, так і від’ємною, залежно від характеру діючих сил і вибору нульового рівня.
Слід указати й на те, що потенціальна енергія частинки в силовому полі, створеному іншим тілом, не "належить" тільки цій частинці. За третім законом Ньютона на "інше тіло" з боку частинки діє така сама за модулем консервативна сила, і слід було би говорити також про потенціальну енергію цього тіла. Отже, насправді потенціальна енергія належить обом тілам і є енергією їхньої взаємодії. Але коли характеристики тіл дуже відрізняються (як, наприклад, у випадку каменя й Землі), то на стан одного з них (Землі) взаємодії практично не впливає. Тоді таке тіло розглядають не як партнера по взаємодії, а як джерело силового поля, в якому перебуває інше. Тому говоримо не про потенціальну енергію взаємодії каменя й Землі, а про потенціальну енергію каменя в полі сил тяжіння Землі.
Потенціальна енергія системи частинок. Серед консервативних сил, які діють на частинки системи, можуть бути як зовнішні (сили зовнішніх потенціальних полів), так і внутрішні (сили взаємодії частинок між собою). Тому потенціальну енергію системи U поділяють на зовнішню Uз (енергію в зовнішньому полі) і внутрішню або власну Uв :
|
U = Uз + Uв. |
(6.23) |
Зовнішня потенціальна енергія визначається співвідношенням (6.17) через сумарну роботу всіх зовнішніх консервативних сил :
|
\( {A}=\sum{{{A}_{i}}}=\sum{{{U}_{1}}_{i}}-\sum{{{U}_{2}}_{i}}\quad \Rightarrow \quad {{U}_{3}}=\sum{{{U}_{i}}}\) |
У цьому виразі Ui – потенціальні енергії окремих частинок системи в зовнішньому полі. Отже, зовнішня потенціальна енергія системи є адитивною величиною. Але цього не можна сказати про власну та повну потенціальну енергію системи. Справді, нехай дві системи, що мають власні потенціальні енергії Uв1 і Uв2, об’єднуються в одну систему, як це схематично показано на рис. 6.14
 |
Uв = Uв1 + Uв2 + U12,
де U12 – енергія взаємодії між частинами об’єднаної системи, рівна роботі, що була виконана силами взаємодії в процесі об’єднання.Зв'язок між потенціальною енергією та силою.
Оскільки роботу консервативної сили можна знайти як безпосередньо через силу, так і через потенціальну енергію, між цими величинами існує прямий зв’язок. Розглянемо роботу ΔA довільної консервативної сили \(\vec{F}\) на невеликому переміщенні \(\Delta{\vec{S}}\) (рис. 6.13). Наближено вона визначається як \( A\approx\vec{F}\cdot\Delta{\vec{S}}=F\cdot\Delta{S}\cos\alpha=F_S\Delta{S}\) (неточність зумовлена тим, що в різних точках навіть невеликого переміщення сила може мати відмінні значення), звідки \( F_s\approx\frac{\Delta{A}}{\Delta{S}}\). Але, відповідно до співвідношення (6.17), \( A=-\Delta{U}\), тож \( F_s\approx-\frac{\Delta{U}}{\Delta{S}}\). Точний вираз отримаємо у границі ΔS →0:
\(F{S}=-\underset{\Delta{S}\to{0}}\lim\frac{\Delta{U}}{\Delta{S}}\).
Така границя в математиці позначається як \(\frac{\partial{U}}{\partial{S}}\) і називається похідною функції U по напрямку S. Вона показує швидкість зміни величини U при переміщенні в заданому напрямку S. Отже, враховуючи цю символіку, можемо записати:
|
\( F_s=-\frac{\partial{U}}{\partial{S}}\) |
(6.21) |
тобто,
проекція консервативної сили на будь-який напрям дорівнює взятій з протилежним знаком похідній потенціальної енергії в цьому напрямі.

Це означає, що сила спрямована в бік зменшення потенціальної енергії і є тим більша, чим швидше змінюється потенціальна енергія в цьому напрямі.
Вираз (6.21) дозволяє аналогічно визначити проекції сили на координатні осі:
\({{F}_{x}}=-\frac{\partial U}{\partial x},\quad {{F}_{y}}=-\frac{\partial U}{\partial y},\quad {{F}_{z}}=-\frac{\partial U}{\partial z}.\)
При цьому елементарні переміщення вздовж координатних осей є нескінченно малими змінами (диференціалами) координат, тобто аргументів функції потенціальної енергії U = U(x, y, z). Тому похідна по кожному з напрямків x, y, z визначається за звичайними правилами диференціювання, але дві інші координати при цьому розглядаються як константи.
За знайденими проекціями вектор сили виражається як \(\vec{F}=-\left(\vec{i}\frac{\partial{U}}{\partial{x}}+\vec{j}\frac{\partial{U}}{\partial{y}}+\vec{k}\frac{\partial{U}}{\partial{z}}\right) \). Потреба в подібних операціях і в математиці, і у фізиці виникає доволі часто, тому вираз у дужках має свою назву й позначення. Він називається градієнтом потенціальної енергії[7] й позначається як gradU:
\(\mathrm{grad}U=\left(\vec{i}\frac{\partial{U}}{\partial{x}}+\vec{j}\frac{\partial{U}}{\partial{y}}+\vec{k}\frac{\partial{U}}{\partial{z}}\right) \).
Зрозуміло, що поняття градієнта відноситься й до інших величин, які є функціями координат.
Таким чином, зв’язок між силою, та потенціальною енергією записується у вигляді:
|
\(\vec{F}=-\mathrm{grad}U \), |
(6.22) |
консервативна сила, що діє на частинку, дорівнює взятому з протилежним знаком градієнту потенціальної енергії цієї частинки.
У математиці доводиться, що вектор градієнта даної функції напрямлений у бік її найшвидшого зростання й по модулю дорівнює цій швидкості. Тому
будь-яка консервативна сила спрямована в бік найшвидшого зменшення потенціальної енергії.
Зокрема, із цієї причини вода під дією сили тяжіння стікає по лінії найбільшої крутизни схилу.
Робота сил і механічна енергія частинки.
|
E = K + U. |
(6.25) |
Це означення стосується як окремої частинки, так і довільної системи. При цьому для системи інколи окремо вирізняють суму кінетичної та власної потенціальної енергії, називаючи її власною механічною енергією системи.
Механічна енергія частинки. У загальному випадку на окрему частинку діють консервативні сили з боку потенціального поля, в якому вона перебуває, та інші (неконсервативні) сили, які будемо називати сторонніми силами. Згідно з теоремою про кінетичну енергію (6.8а), сумарна робота усіх сил дорівнює зміні кінетичної енергії частинки:
Aк + Aст = ΔK
де Aк і Aст – робота рівнодійної консервативних та рівнодійної сторонніх сил, відповідно. Але робота консервативних сил дорівнює спадові потенціальної енергії частинки (6.17), тому–ΔU + Аст = ΔК → ΔК + ΔU = Аст → Δ(К + U) = Аст
K + U = E – то є повна механічна енергія частинки Е, отже
|
|
ΔЕ = Е2 – Е1 = Аст , |
(6.26) |
Таким чином,
зміна повної механічної енергії частинки дорівнює роботі всіх сторонніх сил, які діють на неї.
Для елементарного переміщення
|
dE = δAст . |
(6.26а) |
Коли сторонні сили відсутні, δAст = 0, dE = 0 і E = const. Отже,
якщо на частинку діють тільки консервативні сили, то її повна механічна енергія зберігається[9], тобто, не змінюється під час руху.
Інакше говорячи, енергія є законсервованою. Звідси походить термін “консервативні сили”
Робота сил та механічна енергія довільної системи.
Розглянемо тепер роботу всіх сил у довільній системі. В загальному випадку як серед внутрішніх, так і серед зовнішніх сил можуть бути і консервативні, і неконсервативні сили. Будь-які зовнішні неконсервативні сили, як і раніше, будемо називати сторонніми силами. Що ж до внутрішніх неконсервативних сил, то в реальних системах – це завжди тільки дисипативні сили та гіроскопічні сили, що роботи не виконують (див. п. 6.3). Отже, повна робота всіх сил у довільній системі складається з роботи консервативних сил (як внутрішніх, так і зовнішніх), внутрішніх дисипативних сил і сторонніх (включно із зовнішніми дисипативними) сил:
A = Aкон + Aдис + Aст ,
де Ак – робота всіх консервативних сил (як внутрішніх, так і зовнішніх), Адис – робота внутрішніх дисипативних сил, і Аст – робота сторонніх сил.Як уже згадувалося, робота всіх сил дорівнює приросту кінетичної енергії, а робота консервативних сил – спадові потенціальної енергії системи, тому
ΔK = -ΔU + Aдис + Аст → ΔK + ΔU = Aдис + Аст →
Δ(K + U) = Aдис + Аст.
Урахувавши, що K + U = E – повна механічна енергія системи, отримуємо:
|
ΔE = E2 - E1 = Aдис + Аст. |
(6.27) |
При елементарній зміні стану системи
|
dE = δAдис + δАст. |
(6.27а) |
Таким чином,
зміна повної механічної енергії довільної системи дорівнює сумарній роботі всіх внутрішніх дисипативних сил і всіх сторонніх сил.
Це найбільш загальне (і важливе) співвідношення між механічною енергією та роботою сил.
5.4. Закон збереження механічної енергії
В замкненій (ізольованій) системі зовнішні сили відсутні, тож δAст = 0. Тому
|
dE = δAдис , ΔE = E2 - E1 = Aдис. |
”(6.28) (6.28а) |
Отже, механічна енергія замкненої системи не зберігається, її зміна дорівнює роботі дисипативних сил взаємодії між частинками системи. Оскільки завжди δAдис < 0 (див. п. 6.3), під час руху тіл механічна енергія замкненої системи невпинно зменшується. Але, якщо дисипативні сили відсутні (δAдис = 0), то dE = 0 і E = const. У цьому полягає закон збереження механічної енергії :
За відсутності дисипативних сил повна механічна енергія будь-якої замкненої системи зберігається, тобто, не змінюється під час руху частинок системи.
З іншого боку, за відповідних умов механічна енергія може зберігатися і в незамкненій системі. Згідно з (6.27) і (6.27а), це буде тоді, коли сумарна робота внутрішніх дисипативних сил та сторонніх сил дорівнює нулю. Тому треба чітко усвідомити, що, на відміну від імпульсу, умовою збереження механічної енергії є не замкненість (ізольованість) системи, а характер діючих в системі сил і величина виконуваної ними роботи.
Як відмічалося, за наявності внутрішніх дисипативних сил механічна енергія замкненої системи поступово зменшується. Але дослід свідчить, що вона не зникає, а перетворюється на інші види, найчастіше в тепло – кожному добре відоме нагрівання рухомих тіл унаслідок тертя (отримана теплова енергія далі передається довкіллю, тобто, відбувається розпорошування, інакше – “дисипація” енергії; цим пояснюється назва “дисипативні сили”). Це є одним із проявів універсального закону збереження енергії:
енергія не виникає з нічого й не зникає безслідно, вона тільки переходить з одних форм в інші та від одних тіл до інших у рівних кількостях.
Інакше говорячи,
сума всіх видів енергії у будь-якій замкненій фізичній системі зберігається, тобто не змінюється з часом.
Розглянутий аналіз висвітлює роль роботи дисипативних сил у процесах перетворення механічної енергії:
робота дисипативних сил є мірою перетворення механічної енергії в інші, не механічні види.
Якщо в замкненій системі діють тільки консервативні сили, то механічна енергія не змінюється, тобто не переходить у інші види. Але за рахунок роботи консервативних сил відбувається перетворення кінетичної енергії в потенціальну і навпаки. Отже,
робота консервативних сил є мірою перетворення одного виду механічної енергії в інший без зміни її загальної величини
При цьому, коли консервативні сили виконують додатню роботу, потенціальна енергія, переходить у кінетичну, а коли – від’ємну, то кінетична енергія переходить у потенціальну. Це наочно видно у випадку руху тіл під дією сили тяжіння.
5.5. Зіткнення
Імпульс і кінетична енергія в системі відліку центра мас. Раніше відмічалося, що процеси зіткнень зручно розглядати в системі відліку центра мас (Ц-системі). Тому з’ясуємо, як визначаються імпульс та кінетична енергія частинок у Ц-системі відліку.
Нехай частинки масами m1 і m2, рухаються в певній К-системі відліку зі швидкостями \(\vec{v}_1 \) і \(\vec{v}_2 \). Згідно з перетвореннями (1.33), їх швидкості в Ц-системі дорівнюють[11]:
|
\(\tilde{\vec{v}}_1=\vec{v}_1-\vec{V},\,\,\,\,\tilde{\vec{v}}_2=\vec{v}_1-\vec{V}\), |
(6.29) |
\(\tilde{\vec{p}}_1=m_1(\vec{v}_1-\vec{V})\) і \(\tilde{\vec{p}}_2=m_1(\vec{v}_2-\vec{V}) \).
У записаних виразах і надалі величини, що визначені в Ц-системі відліку, будемо помічати позначкою ~ (тильда) над символом величини.
Підставивши у попередню формулу вираз \(\vec{V}\) (5.9), після нескладних перетворень одержимо
|
\(\tilde{\vec{p}}_1=\frac{m_1 m_2}{m_1+m_2}(\vec{v}_1-\vec{v}_2),\,\,\,\,\tilde{\vec{p}}_2=\frac{m_1 m_2}{m_1+m_2}(\vec{v}_2-\vec{v}_1) \). |
(6.30) |
Величина
|
\(\mu=\left(\frac{1}{m_1}+\frac{1}{m_2}\right)^{-1}=\frac{m_1 m_2}{m_1+m_2}\) |
(6.31) |
називається зведеною масою двох частинок, тому
|
\(\tilde{\vec{p}}_1=\mu(\vec{v}_1-\vec{v}_2),\,\,\,\,\,\,\tilde{\vec{p}}_2=\mu (\vec{v}_2-\vec{v}_1) \) |
(6.32) |
Величина
|
\( v_r = |\vec{v}_1-\vec{v}_2| \) |
(6.33) |
|
\( p=\mu v_r \). |
(6.34) |
Відносною швидкістю та зведеною масою визначається й кінетична енергія двох частинок у Ц-системі відліку:
|
\(\tilde{K}=\tilde{K}_1+\tilde{K}_2=\frac{\tilde{p}_1^2}{2m_1}+\frac{\tilde{p}_2^2}{2m_2}=\frac{\tilde{p}^2}{2\mu}=\frac{\mu v_r^2}{2}\). |
(6.35) |
Абсолютно непружне зіткнення
Тут і далі будемо вважати, що, по-перше, на частинки не діють зовнішні сили (або вони є компенсованими) і, по-друге, частинки взаємодіють тільки в процесі зіткнення, тобто під час контакту. Тоді, хоча імпульс кожної частинки при зіткненні змінюється, їхній сумарний імпульс зберігається (див. п. 5.2).
Абсолютно непружним називають зіткнення, при якому частинки далі рухаються разом, як одне складене тіло (“злипаються”). Розглянемо таке зіткнення двох частинок масами m1 і m2, що рухаються в інерціальній К-системі відліку зі швидкостями \(\vec{v}_1 \) і \(\vec{v}_2 \). Оскільки імпульс будь-якої системи тіл у Ц-системі відліку дорівнює нулю, то в ній після абсолютно непружного зіткнення швидкість частинок \(\tilde{\vec{v}}'=0 \). Це, згідно з (1.33а), означає, що в К-системі відліку їхня швидкість після зіткнення \(\vec{v}\) дорівнює швидкості центра мас системи \(\vec{V}\). Отже, згідно з (3.9),
|
\(\vec{v}=\frac{m_1\vec{v}_1+m_2\vec{v}_2}{m_1+m_2}\). |
(6.36) |
Абсолютно непружне зіткнення супроводжується втратами кінетичної енергії, яка частково переходить у внутрішню (теплову) енергію тіл, і вони в тій, чи іншій мірі нагріваються. В Ц-системі відліку внаслідок зіткнення тіла зупиняються, тобто втрачають усю кінетичну енергію. Отже, кількість теплоти, що виділяється при абсолютно непружному зіткненні, дорівнює початковій кінетичній енергії частинок у Ц-системі відліку:
|
\( Q=\tilde{K}=\frac{\mu v_r^2}{2}\). |
(6.37) |
У К-системі відліку ця величина складає лише частину кінетичної енергії тіл і, відповідно до (6.31) і (6.33), визначається виразом
|
\( Q=K_1-K_2=\frac{m_1 m_2}{2(m_1+m_2)}(v_1-v_2)^2 \). |
(6.38) |
При цьому не втрачена частина кінетичної енергії - то є енергія руху системи частинок як цілого.
Абсолютно пружне центральне зіткнення
Абсолютно пружним називають зіткнення, при якому між тілами діють тільки пружні сили. Як наслідок, після пружного зіткнення тіла розлітаються, тобто, рухаються окремо одне від одного. Під час самого зіткнення в тілах виникають чисто пружні деформації, котрі повністю зникають після розльоту, і внутрішній стан тіл повністю відновлюється. Тому не змінюється й механічна енергія системи. Крім того, через швидкоплинність процесу, під час зіткнення положення тіл у просторі практично не змінюється. Тому не змінюється й потенціальна енергія системи, тож її можна взагалі не враховувати. Таким чином при абсолютно пружному зіткненні одночасно зберігаються сумарний імпульс і кінетична енергія тіл, що стикаються. Це можна розглядати як критерій абсолютно пружного зіткнення.
Існують два різновиди абсолютно пружного зіткнення: центральне (лобове, пряме) та нецентральне (нелобове, косе). При лобовому зіткненні швидкості частинок як до, так і після зіткнення, напрямлені вздовж прямої, що з’єднує частинки. При нелобовому зіткненні напрями руху частинок до та після зіткнення не лежать на одній прямій.
Розглянемо лобове зіткнення двох частинок. В Ц-системі відліку дві частинки завжди мають однакові за величиною і протилежні за напрямом імпульси (див. (6.30)), тому при центральному пружному зіткненні напрям імпульсу кожної частинки змінюється на протилежний. А оскільки при цьому кінетична енергія системи зберігається, то модулі імпульсу та швидкості частинок лишаються незмінними. Отже,
\(\vec{\tilde{v^{\prime}}}_i=-\vec{\tilde{v}}_i \), де i = 1, 2.
Урахувавши це й, скориставшись формулами (6.29), знайдемо швидкості частинок після зіткнення в К-системі відліку:
\(\vec{v'}_i=\vec{\tilde{v'}}_i+\vec{V}=\vec{V}-\vec{\tilde{v}}_i=\vec{V}-\left(\vec{v}_i-\vec{V}\right)=2\vec{V}-\vec{v}_i \),
де \(\vec{V}\) – швидкість центра мас частинок, яка визначається формулою (3.9). Отже,
.\(\vec{v}_{i}^{\prime}=2\cdot\frac{\sum\limits_{i}m_{i}\vec{v}_{i}}{\sum\limits_{i}m_{i}}-\vec{v}_{i}\) = \(\frac{2\sum\limits_{i}m_{i}\vec{v}_{i}-\vec{v}_{i}\sum\limits_{i}m_{i}}{\sum\limits_{i}m_{i}}\).
Підставивши значення індексів, одержимо вираз швидкості для кожної частинки:
|
\(\vec{v}_1^{\prime}=\frac{(m_1-m_2)\vec{v}_2+2m_1\vec{v}_1}{m_1+m_2},\,\,\,\,\,\vec{v'}_2=\frac{(m_2-m_1)\vec{v}_2+2m_1\vec{v}_1}{m_1+m_2}\). |
(6.39) |
Для зіткнення частинок однакової маси ці формули дають \(\vec{v}_1^{\prime}=\vec{v}_2 \) і \(\vec{v}_2^{\prime}=\vec{v}_1 \) , тобто, частинки обмінюються швидкостями. Зокрема, якщо друга частинка перед зіткненням перебувала у спокої, то після зіткнення вона почне рухатись із швидкістю першої, а перша зупиниться. У загальному ж випадку для обчислень формули (6.39) треба записати в проекціях на осі вибраної системи координат.
5.6. Контрольні запитання
1. Дайте означення понять “робота” та “потужність” сили й укажіть загальні властивості цих величин. Який фізичний зміст має від’ємна робота сили?
2. Як обчислюється робота сили на заданій траєкторії довільної форми? В яких випадках це можна зробити без застосування інтегрального числення?
3. Який геометричний зміст має робота сили?
4. Укажіть зв’язок між роботою сил і кінетичною енергією? Чи залежить він від фізичної природи сил?
5. Які сили називаються консервативними? Наведіть приклади.
6. Який загальний зміст має поняття “потенціальна енергія” та як вона пов’язана з роботою сил.
7. Які сили називаються дисипативними? Яку особливість вони мають?
8. Що таке “гіроскопічні сили”? Наведіть приклали.
9. Охарактеризуйте зв’язок між повною механічною енергією та роботою сил у незамкненій та в замкненій механічній системі.
10. Сформулюйте загальний закон збереження енергії. Який загальний фізичний зміст має механічна робота?
11. Яка відміна існує між непружним та пружним зіткненням тіл?
12. Виведіть формули для швидкості після непружного зіткнення двох тіл (6.36) і для втрати їхньої кінетичної енергії (6.38).
13. Виведіть формули (6.39) для швидкостей двох тіл після їхнього пружного центрального зіткнення.
6. ЕЛЕМЕНТИ МЕХАНІКИ ТВЕРДОГО ТІЛА
При розгляді рухів твердого тіла поряд із основними лінійними кінематичними величинами (переміщення, швидкість, прискорення) використовують кутові характеристики руху – кут повороту, кутову швидкість і кутове прискорення. В динаміці системи частинок і твердого тіла також використовують відповідні кутові величини, що називаються "моментами" і є аналогами розглянутих раніше динамічних величин. А саме, стан руху визначають моментом імпульсу, силову дію – моментом сили, а інертність – моментом інерції.
Нижче розглянуті наступні питання:
6.1. Рівняння моментів
6.2. Закон збереження моменту імпульсу
6.4. Збереження моменту імпульсу відносно осі
6.5. Кінетична енергія обертального і плоского руху
6.6. Гіроскопи
6.7. Контрольні запитання
6.1. Рівняння моментів
Розглянемо зміст динамічних кутових величин і зв’язок між ними.
Момент імпульсу. Нехай рухома частинка маси m має швидкість \(\vec{v}\) та імпульс \(\vec{p}=m\vec{v}\) , а її положення відносно обраного початку відліку О визначається радіусом-вектором \(\vec{r}\) (рис. 7.1). Тоді за означенням
моментом імпульсу частинки відносно даної точки О називається векторний добуток векторів \(\vec{r}\) і \(\vec{p}\):
|
\(\vec{L}=\left[\vec{r}\vec{p}\right] \). |
(7.1) |
|
|
|

З цього означення випливає, що момент імпульсу є аксіальним вектором, тобто, його напрям визначається правилом правого гвинта, а модуль дорівнює:
|
\( L=rp\sin\alpha=pd \), |
(7.1а) |
де α – кут між напрямами векторів \(\vec{r}\) і \(\vec{p}\), а \( d=r\sin\alpha \) – відстань від точки О до лінії вектора \(\vec{p}\), яка називається плечем вектора \(\vec{p}\).
Правило правого гвинта: якщо обертати правий гвинт від напрямку вектора \(\vec{r}\) до напрямку вектора \(\vec{p}\) , то він буде вгвинчуватись у напрямку вектора \(\vec{L}\).
Вектор \(\vec{L}\), початок якого прийнято розміщувати в точці О, є перпендикулярним до площини векторів \(\vec{r}\) і \(\vec{p}\), тобто, до площини, в якій відбувається рух частинки. Тому при русі частинки по плоскій замкненій траєкторії (орбіті) навколо заданої точки О напрям вектора моменту імпульсу відносно цієї точки визначає розташування (орієнтацію) орбіти частинки у просторі.
Момент імпульсу, як і імпульс, є адитивною величиною: момент імпульсу системи частинок відносно даної точки дорівнює векторній сумі моментів імпульсу всіх частинок системи відносно тієї ж точки:
|
\(\vec{L}=\sum_i\vec{L}_{i}\). |
(7.2) |
|
\(\vec{M}=\left[\vec{r}\vec{F}\right] \). |
(7.3) |
Вектор \(\vec{M}\) також є аксіальним вектором: його напрям визначається правилом правого гвинта (рис. 7.2), а модуль – формулою
|
\( M=rF\sin\alpha=l F \), |
(7.4) |
де \( l \) – плече сили \(\vec{F}\) відносно точки О, тобто, відстань від точки О до лінії дії цієї сили.
Із означення (7.3) випливають наступні загальні властивості моменту сили.
– момент центральної сили (див. лекцію 6, п. 6.3) відносно силового центра дорівнює нулю;
– момент сили не змінюється при перенесенні вектора сили уздовж його лінії (рис. 7.3а). Це дозволяє при розгляді задач для зручності розміщувати точку прикладання сили не там, де вона виникає, наприклад у точці дотику нитки та прив’язаного до неї тіла, а в будь-якому місці на лінії дії сили.
Окрім того, сумарний момент сил взаємодії між двома частинками \({{\vec{F}}_{2}}=-{{\vec{F}}_{1}}\) (рис. 7.3б) відносно будь-якої точки дорівнює нулю:|
\(\vec{M}=\vec{M}_1+\vec{M}_2=\left[\vec{r}_1,\vec{F}_1\right]+\left[\vec{r}_2,\vec{F}_2\right]=\left[\left(\vec{r}_1-\vec{r}_2\right),\vec{F}_1\right]=\left[\vec{r}_{12},\vec{F}_1\right]=0 \). |
(7.5) |
|
|
|

Рівняння моментів для частинки. За винятком рівномірного прямолінійного руху, момент імпульсу частинки змінюється з часом. Аби з’ясувати, чим визначається ця зміна, знайдемо похідну по часу від вектора моменту імпульсу \(\vec{L}\):
|
\(\frac{\mathrm{d}\vec{L}}{\mathrm{d}t}=\left[\frac{\mathrm{d}\vec{r}}{\mathrm{d}t},\vec{p}\right]+\left[\vec{r},\frac{\mathrm{d}\vec{p}}{\mathrm{d}t}\right] \). |
Знаходження похідної від векторного добутку виконується так само, як для скалярного добутку двох функцій. Єдина особливість полягає в тому, що порядок множників не можна змінювати.
Похідна \(\mathrm{d}\vec{r}/\mathrm{d}t=\vec{v}\) – це швидкість частинки. Тому, позаяк вектори \(\vec{v}\) і \(\vec{p}=m\vec{v}\) є збіжними за напрямом, перший доданок дорівнює нулю. У друому доданку \(\frac{\mathrm{d}\vec{p}}{\mathrm{d}t}=\vec{F}\) – сила, що діє на частинку. Отже,
|
\(\frac{\mathrm{d}\vec{L}}{\mathrm{d}t}=\left[\vec{r},\vec{F}\right] \), |
або
|
\(\frac{\mathrm{d}\vec{L}}{\mathrm{d}t}=\vec{M}\). |
(7.6) |
Таким чином,
швидкість зміни вектора моменту імпульсу частинки відносно даної точки дорівнює моменту прикладеної до частинки рівнодійної сили відносно цієї точки.
З рівняння (7.6) випливає також, що
|
\(\mathrm{d}\vec{L}=\vec{M}\mathrm{d}t \), |
(7.7) |
де величина в правій частині називається імпульсом моменту сили за проміжок часу dt.
Отже,
зміна моменту імпульсу частинки дорівнює імпульсу моменту сил, що діють на неї.
Зміна моменту імпульсу частинки за скінченний проміжок часу \(\left[t_1,\,\,t_2\right] \) визначається інтегруванням виразу (7.7):
|
\(\Delta\vec{L}=\vec{L}_2-\vec{L}_1=\int_{t_1}^{t_2}\vec{M}(t)\mathrm{d}t \). |
(7.7а) |
Рівняння (7.6), (7.7) і (7.7а) називаються рівняннями моментів.
Як за змістом, так і за формою вказані рівняння є аналогами відповідних рівнянь другого закону Ньютона (3.3), (3.4) і (3.4а), причому роль імпульсу відіграє момент імпульсу, а роль сили – момент сили. Зауважимо також, що рівняння моментів можна використовувати і в неінерціальних системах відліку, якщо крім моментів сил взаємодії враховувати й моменти сил інерції.
Рівняння моментів для довільної системи частинок легко одержати, узагальнюючи рівняння (7.6), (7.7) і (7.7а) для системи. Згідно з (7.2) і (7.6), швидкість зміни моменту імпульсу системи
|
\(\frac{\mathrm{d}\vec{L}}{\mathrm{d}t}=\sum_{i}\frac{\mathrm{d}\vec{L}_{i}}{\mathrm{d}t}=\sum_{i}\vec{M}_{i}\)зовн, |
де \(\vec{L}_i \) – моменти імпульсів окремих частинок системи відносно заданої точки, \(\vec{M}_i \) – моменти всіх сил, які діють на кожну частинку, відносно тієї ж точки. Очевидно, що повний момент сил можна подати, як суму моментів внутрішніх та зовнішніх сил:
\(\sum_{i}\vec{M}_{i}=\sum_{i}\vec{M}_{i}\)вн + \(\sum_{i}\vec{M}_{i}\)зовн.
Оскільки в будь-якій системі повний момент внутрішніх сил є сумою моментів сил взаємодії між кожною парою тіл, то, згідно з (7.5), перший доданок у цьому виразі дорівнює нулю, і для \(\mathrm{d}\vec{L}/\mathrm{d}t \) маємо:
|
\(\frac{\mathrm{d}\vec{L}}{\mathrm{d}t}=\vec{M}\)зовн |
(7.8) |
де
\(\vec{M}\)зовн = \(\sum_{i}\vec{M}_{i}\)зовн.
Таким чином,
швидкість зміни моменту імпульсу довільної системи відносно даної точки дорівнює сумарному (повному) моменту зовнішніх сил, що діють на тіла системи, відносно тієї самої точки.
Відповідно, зміна моменту імпульсу системи за нескінченно малий, або скінченний проміжок часу визначається імпульсом моменту зовнішніх сил за цей проміжок:
|
\( d\vec{L}=\vec{M}\)зовн\( {dt}\) |
(7.9) |
|
|
\(\Delta \vec{L}={{\vec{L}}_{2}}-{{\vec{L}}_{1}}=\int\limits_{{{t}_{1}}}^{{{t}_{2}}}{\vec{M}{{\left( t \right)}_{}}dt}\)
|
(7.9а) |
Рівняння (7.8), (7.9) і (7.9а) є рівняннями моментів для довільної системи.
6.2. Закон збереження моменту імпульсу
Якщо система замкнена, то \(\vec{F}_{i\,зовн}=0\) і \(\vec{M}_{i\,зовн}=0\). Тоді з рівняння моментів (7.8) маємо:
|
\(\frac{d\vec{L}}{dt}=0\quad \Rightarrow \quad \vec{L}=\sum{{{L}_{i}}=const}\)
|
(7.10) |
У цьому полягає закон збереження моменту імпульсу:
момент імпульсу замкненої системи зберігається,
тобто, не змінюється з часом. При цьому моменти імпульсу окремих частинок, звичайно, можуть змінюватися внаслідок взаємодії з іншими частинками системи. Але ці зміни мають характер обміну, так що повний момент імпульсу системи лишається незмінним.
Слід зазначити, що момент імпульсу зберігається і в незамкнених системах (\(\vec{F}_i \)повн ≠ 0) за умови, що зовнішні сили або не створюють моментів (\(\vec{M}_i \)зовн = 0), або сума цих моментів дорівнює нулю (але ця умова, на відміну від моментів внутрішніх сил, може виконуватися лише для певної точки (або точок) відліку). Прикладом може слугувати рух планет. На кожну планету з боку Сонця діє зовнішня сила тяжіння. Напрям цієї сили проходить через центри як Сонця, так і планети, тож вона на створює моментів відносно цих точок. Тому вектори моментів імпульсу орбітального руху планет та їхнього добового обертання навколо власної осі є незмінними. Одним із наслідків цього є незмінність просторової орієнтації площини орбіти планети та орієнтації осі добового обертання планети відносно площини орбіти. Зокрема, земна вісь зберігає свій нахил до площини орбіти, що спричинює зміну пір року.
За логікою наведених вище міркувань, закон збереження моменту імпульсу випливає з рівняння моментів (7.8), тобто постає як наслідок основних законів динаміки. Але насправді закон збереження моменту імпульсу, як і закон збереження імпульсу (див. лекцію 5, п. 5.2), є фундаментальним законом природи. Зокрема, закон збереження моменту імпульсу виконується і в немеханічних системах, які не підпорядковані законам Ньютона, таких як електромагнітне випромінювання, атоми, ядра, тощо.
6.3. Динаміка твердого тіла
Твердим тілом називається тіло, відстань між будь-якими двома точками котрого не змінюється в процесі руху. Отже, тверде тіло можна розглядати як систему жорстко зв’язаних матеріальних точок, яка задовольняє розглянуті вище положення механіки системи частинок.
У кінематиці відмічалося, що довільний рух твердого тіла можна трактувати як сукупність поступального та обертального рухів. Тому для визначення руху твердого тіла треба задати рівняння руху будь-якої жорстко зв'язаної з ним точки та рівняння руху тіла відносно цієї точки. Найзручнішою такою точкою є центр мас тіла (зручність такого вибору зумовлена тим, що, як виявляється, сумарний момент сил інерції відносно центра мас завжди дорівнює нулю). Відповідно, загальними рівняннями динаміки твердого тіла є рівняння руху центра мас (3.10) і рівняння моментів (7.8) відносно центра мас:
|
\( m\vec{a}_c=\vec{F}\), |
(7.11) |
|
|
\(\frac{\mathrm{d}\vec{L}}{\mathrm{d}t}=\vec{M}_c \), |
(7.12) |
де \(\vec{F}\) – сума всіх сил, які діють на тіло (включно із силами інерції), а \(\vec{M}_c \) – сумарний момент лише сил взаємодії. При цьому немає потреби говорити, що йдеться про зовнішні сили, оскільки внутрішні сили взаємодії між частинками твердого тіла ніяк не впливають на його механічну енергію та рух, і їх взагалі не розглядають.
Ці рівняння виглядають досить простими, але насправді механіка довільного руху твердого тіла є доволі складною. Тому обмежимося розглядом лише простих рухів твердого тіла – обертання навколо нерухомої осі та плоского руху. Ще простіший поступальний рух повністю визначається рухом однієї точки тіла (рівняння (7.11)) і не потребує спеціального розгляду.
При обертанні навколо нерухомої осі та плоскому рухах напрям осі обертання тіла не змінюється. Тому замість векторного рівняння (7.12) зручно використовувати рівняння моментів у проекціях на вісь обертання Z:
|
\(\frac{\mathrm{d}L_z}{\mathrm{d}t}=M_z \). |
(7.13) |
Проекції векторів моменту імпульсу Lz та моменту сили Mz на задану вісь Z називають моментом імпульсу відносно осі та моментом сили відносно осі. Отже, моменти відносно осі є не векторними, а алгебраїчними величинами. Розглянемо, чим вони визначаються.
Момент імпульсу відносно осі та момент інерції. Обертове тверде тіло можна розглядати як сукупність маленьких часточок масами mі, що рухаються навколо спільної осі Z по колах радіусів Ri із швидкостями \( v_i=\omega R_i \), де \(\omega \) – модуль кутової швидкості тіла (рис. 7.4). Відносно довільної точки відліку О на осі обертання окрема частинка у певний момент часу має вектор імпульсу \(\vec{p}_i=\Delta{m}_i\vec{v}_i \) та вектор моменту імпульсу \(\vec{L}=\left[\vec{r}_i,\,\,\vec{p}_i\right] \). Модуль моменту імпульсу цієї частинки відносно осі Z
\(\left|L_{zi}\right|=L_i\cos\alpha_i=r_i\Delta{m_i}v_i\sin\vartheta_i=\Delta{m_i}v_i R_i=\Delta{m_i}R_i^2\omega \),
де враховано, що вектори \(\vec{r}_i \) та \(\vec{p}_i \) взаємно перпендикулярні, \(\alpha=90{}^{\circ}-\vartheta \) та \( r\sin\vartheta=R \).
|
|

Модуль моменту імпульсу всього тіла відносно осі Z визначається як
\(|L_z |=\sum_i{|L_{zi}|}=\sum_i{\Delta{m_i}{v_i}{R_i}}=\left(\sum_i{\Delta{m_i}R_i^2}\right)\omega \).
Урахувавши, що знак Lz збігається зі знаком ωz, одержимо вираз моменту імпульсу твердого тіла відносно осі обертання:
|
\({{L}_{z}}=\left( \sum{\Delta {{m}_{i}}R_{i}^{2}} \right){{\omega }_{z}}\)
|
(7.14) |
Величина
|
\( {I}=\sum_{i}{\Delta {{m}_{i}}R_{i}^{2}}\) |
(7.15) |
називається моментом інерції тіла відносно заданої осі. Отже,
момент імпульсу твердого тіла відносно осі обертання дорівнює добутку його моменту інерції відносно цієї осі на проекцію кутової швидкості:
|
\( L_z=I\omega_z \). |
(7.16) |
|
|

Момент сили відносно осі
Розглянемо тепер, як обчислюється момент сили Mz відносно закріпленої (фіксованої) осі обертання тіла. Нехай до деякої точки А тіла, що обертається навколо закріпленої осі Z, прикладена довільна сила \(\vec{F}\) (рис. 7.5а). Силу \(\vec{F}\) можна розглядати як суму двох складових – перпендикулярної \({{\vec{F}}_{\bot }}\) та паралельної \({{\vec{F}}_{\parallel }}\) до осі обертання, так що \(\vec{F}\) = \({{\vec{F}}_{\bot }}\) + \({{\vec{F}}_{\parallel}}\). Неважко збагнути, що складова \({{\vec{F}}_{\bot }}\) обертає тіло навколо осі Z, а \({{\vec{F}}_{\parallel }}\) намагається повернути саму вісь. Але, оскільки вісь обертання тіла є закріпленою, то момент сили \({{\vec{F}}_{\parallel }}\) компенсується моментом сил реакції \(\vec{F}^{\prime}\) і \(\vec{F}^{\prime\prime}\) у точках закріплення осі (підшипниках), тож силу \({{\vec{F}}_{\parallel }}\) можна не враховувати. Крім того можна показати, що момент сили відносно осі не залежить від положення початку відліку О на цій осі. Тому величину Mz можна розглядати як проекцію вектора моменту сили \({{\vec{F}}_{\bot }}\) відносно точки O′ – центра кола, по якому рухається точка А (рис. 7.5б). Отже, згідно з (7.4),
|
\( M_z=\pm{F}_{\bot}\cdot{l}\), |
(7.17) |
де \( F_{\bot}\) – модуль сили \(\vec{F}_{\bot}\) і \( l \) – плече цієї сили відносно осі обертання. Знак у виразі (7.17) співпадає із знаком проекції вектора \(\vec{M}'_{\bot}\) на вісь Z. Цю формулу можна подати й інакше, якщо врахувати, що \( l=R\cos\alpha \), де α – кут між вектором \(\vec{F}_{\bot}\) й ортом \(\tau \) напрямку обертання точка А по колу, і що \( F\cos\alpha=F_{\tau}\) – то є проекція сили \(\vec{F}_{\bot}\) (і \(\vec{F}\)) на орт \(\vec{\tau}\):
| \({{M}_{z}}={{F}_{\tau }}R\) | (7.17а) |
Рівняння динаміки обертального руху твердого тіла.
Підставивши вираз (7.16) у рівняння моментів (7.13), отримаємо:
|
\(\frac{\mathrm{d}(I\omega)}{\mathrm{d}t}=M_z\,\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\,I\frac{\mathrm{d}\omega_z}{\mathrm{d}t}=M_z \), |
або
|
\({I\beta_z=M_z}\), |
(7.18) |
де \( I \) – момент інерції тіла відносно осі обертання, \(\beta_z \) – проекція кутового прискорення на цю вісь.
Рівняння (7.18) як за формою, так і за змістом, є аналогом основного рівняння динаміки матеріальної точки (3.5) і називається основним рівнянням динаміки обертального руху твердого тіла. Воно дозволяє визначити кутове прискорення, а потім, за допомогою рівнянь кінематики (2.11) і (2.12), й інші характеристики обертального руху твердого тіла.
З рівняння (7.18) випливає ще й те, що момент інерції тіла при обертальному русі відіграє таку саму роль, як маса при поступальному русі, тобто, момент інерції є мірою інертності обертового тіла. При цьому така “обертальна” інертність залежить не тільки від маси тіла, а й від її розподілу відносно осі обертання.
Укажемо й на те, що рівняння (7.18), разом із (7.11), використовується також при розгляді плоского руху тіла, замість загального рівняння моментів (7.12).
Обчислення моменту інерції. Теорема Штайнера.
Згідно з формулою (7.15) момент інерції визначається не тільки величиною маси тіла, але й розташуванням окремих його частин відносно осі обертання, внаслідок чого момент інерції одного й того ж тіла має різні значення відносно різних осей. Тому для застосування рівняння (7.18) спочатку треба визначити момент інерції тіла відносно заданої осі.
Для довільного тіла ця задача аналітично не розв’язується, і момент інерції доводиться визначати дослідним шляхом. Але для тіл симетричної форми та із симетричним розподілом маси момент інерції можна обчислити. Для цього, найперше, треба взяти до уваги, що маса суцільного тіла неперервно розподілена по об’єму, і тому вираз (7.15) має тільки символічний зміст. Для реальних обчислень замість малих частинок тіла Δm треба розглядати елементарні маси dm, і дискретне додавання замінити інтегруванням:
|
\({I=\int{r^2\mathrm{d}m}=\int\limits_V r^2\rho(r)\mathrm{d}V}\), |
(7.19) |
де r – відстань від даної точки тіла до осі, відносно якої обчислюється момент інерції, ρ(r) – густина речовини тіла в даній точці, яка в загальному випадку може залежати від r, і dV – об’єм нескінченно малої ділянки тіла в околі даної точки.
|
|

Як приклад обчислимо момент інерції однорідного тонкого стержня маси т і довжини \({l}\) відносно перпендикулярної до нього осі, що проходить через центр інерції О (центр мас), та відносно паралельної осі O′, що розташована на довільній відстані а від точки О (рис 7.6). Напрямимо координатну вісь r уздовж стержня й розмістимо початок відліку в його центрі мас О, тобто посередині. На довільній відстані r від початку відліку виділимо нескінченно малу ділянку стержня довжини dr, маса якої дорівнює \(\mathrm{d}m=(m/l)\cdot\mathrm{d}r \). Тоді для осі О, згідно з (7.19), і, враховуючи координати кінців стрижня А та В, отримаємо:
|
\( I_0=\int r^2\mathrm{d}m=\frac{m}{l}\int\limits_{-\frac{l}{2}}^{\frac{l}{2}}r^2\mathrm{d}r=\frac{ml^2}{12}\). |
(7.19а) |
При обчисленні моменту інерції \({I}\) стержня відносно осі O′ координата r відраховується від точки O′, отже \({r_A=a-l/2}\) і \({r_B=a+l/2}\), отже
\({I}=\int{r^2}\mathrm{d}m=\frac{m}{l}\int\limits_{a-\frac{l}{2}}^{a+\frac{l}{2}}r^2\mathrm{d}r=\frac{ml^2}{12}+ma^2 \).
У цьому виразі перший доданок – то є момент інерції стержня \({I_0}\) відносно осі, що проходить через центр мас, тобто:
|
\( {I}={{I}_{0}}+m{{a}^{2}}\) |
(7.20) |
Можна довести, що цей результат є чинним і для будь-якого іншого тіла, незалежно від його форми. Він складає важливу теорему Штайнера:
момент інерції довільного тіла відносно заданої осі дорівнює сумі його моменту інерції відносно паралельної осі, що проходить через його центр інерції, та добутку маси тіла на квадрат відстані між цими осями.
Ця теорема полегшує знаходження моментів інерції симетричних тіл відносно осей, паралельних до осей симетрії тіла.
На завершення наведемо вирази моментів інерції Io деяких однорідних симетричних тіл відносно осей, що проходять через центр інерції і є осями симетрії тіла:
Табл. 1.
| Тіло | Вісь | Момент інерції I0 |
| Тонки стержень довжини l | Перпендикулярна до стержня | \(\frac{1}{12}ml^2 \) |
| Суцільний циліндр радіуса R | Співпадає з віссю циліндра | \(\frac{1}{2}mR^2 \) |
| Суцільна куля радіуса R | Проходить через центр кулі | \(\frac{2}{5}mR^2 \) |
| Суцільний однорідний конус із радіусом основи R | Співпадає з віссю конуса | \(\frac{3}{10}mR^2 \) |
6.4. Збереження моменту імпульсу відносно осі
З рівняння моментів (7.13), за умови, що сумарний момент зовнішніх сил Мz = 0, випливає закон збереження моменту імпульсу відносно осі для окремого тіла та системи тіл:
\( \frac{\mathrm{d}L_z}{\mathrm{d}t}={0}\) \( \Rightarrow \) \( {L}_z=\mathrm{const} \),
\(\sum{{L}_{z}}=\mathrm{const}\).
При цьому повний момент імпульсу може змінюватися з часом (вектор \(\vec{L}\ne\mathrm{const}\)). У розгорнутому вигляді і з урахуванням виразу (7.16) закон збереження моменту імпульсу відносно осі можна записати так:
|
\({I_1\omega_{z1}+I_2\omega_{z2}+...=I_1\omega'_{1z}+I_2\omega'_{z2}+...}\) |
(7.21) |
Величини в лівій та правій частині цього рівняння визначені для спільної осі Z і відносяться до двох довільних моментів часу.
Цікавий прояв закону збереження моменту імпульсу відносно осі обертання тіла спостерігається при зміні його моменту інерції під дією внутрішніх сил. У цьому випадку завдяки збереженню моменту імпульсу змінюється кутова швидкість обертання тіла:
|
\(I_1\omega_1=I_2\omega_2\) \(\Rightarrow\) \(\frac{\omega_2}{\omega_1}=\frac{I_1}{I_2}\). |
(7.22) |
Цей ефект, зокрема, широко використовують спортсмени в різних видах спорту. Наприклад, для пришвидшення свого обертання фігурист здіймає руки догори, зводячи їх над головою, або ж притискає їх до тіла, а для уповільнення – розводить їх у сторони. Подивитися відео Цікава демонстрація американських астронавтів
6.5. Кінетична енергія обертального і плоского руху
Кінетична енергія обертального руху тіла
Кінетична енергія твердого тіла, як адитивна величина, дорівнює сумі кінетичних енергій окремих його частинок:
|
\( K=\sum\limits_{i}{\frac{\Delta {{m}_{i}}v_{i}^{2}}{2}}\) |
(7.23) |
де Δmi та vi – маси та швидкості окремих частинок тіла, відповідно.
Якщо тіло обертається навколо нерухомої осі, то всі його точки рухаються по колах радіусів Ri з однаковою кутовою швидкістю ω, отже vi = ωRi, і кінетична енергія обертального руху
|
\({{K}_{}}=\frac{1}{2}\left( \sum\limits_{i}{\Delta {{m}_{i}}R_{i}^{2}} \right){{\omega }^{2}}\) |
(7.23а) |
Вираз у дужках – то є момент інерції тіла I відносно осі обертання (див. (7.15)), отже, кінетична енергія обертального руху твердого тіла визначається формулою
|
\({{K}_{}}=\frac{I{{\omega }^{2}}}{2}\) |
(7.24) |
Урахувавши вираз (7.16), можна також записати:
|
\({{K}_{}}=\frac{L_{z}^{2}}{2I}\) |
(7.24а) |
Кінетична енергія плоского руху
При плоскому русі кожна частинка Δmі твердого тіла рухається разом із центром мас із швидкістю \(\vec{v}_{c}\) і обертається відносно центра мас (у Ц-системі відліку) із швидкістю \(\tilde{\vec{v}}_{i}\) по колу навколо осі перпендикулярної до площини руху центра мас. Отже, в обраній К-системі відліку кожна частинка твердого тіла, згідно з (1.33а), має швидкість \(\vec{v}_i=\tilde{\vec{v}}_i+\vec{v}_c \). Підставивши цей вираз у (7.21), отримаємо:
\( {K}_{}=\sum\limits_{i}{\frac{\Delta {{m}_{i}}{{\left( {{{\vec{v}}}_{c}}+{{{\tilde{\vec{v}}}}_{i}} \right)}^{2}}}{2}} \) = \( \left( \sum\limits_{i}{\Delta {{m}_{i}}} \right)\frac{v_{c}^{2}}{2}+\sum\limits_{i}{\Delta {{m}_{i}}{{{\tilde{\vec{v}}}}_{i}}}+\sum\limits_{i}{\frac{\Delta {{m}_{i}}\tilde{v}_{i}^{2}}{2}}\)
Оскільки \( \sum\limits_{i}\Delta{m_{i}} \) – то є маса всього тіла т, перший доданок у цьому виразі визначає кінетичну енергію поступального руху \({K_п=mv_c^2/2}\). Другий доданок дорівнює нулю, бо в ньому другий множник є виразом імпульсу тіла в Ц-системі відліку, що завжди дорівнює нулю (див. (5.11)). Швидкості \({\tilde{v}_i}\) – це лінійні швидкості обертального руху точок тіла навколо фіксованої осі, що проходить через центр мас. Тому останній доданок, згідно з (7.23) і (7.23а), визначає кінетичну енергію обертального руху тіла, і його можна замінити виразом (7.24). Таким чином для кінетичної енергії плоского руху тіла маємо:
|
\({K}\)пл = \(\frac{I\omega^2}{2}+\frac{mv_c^2}{2}\), |
(7.25) |
де \({I}\) – момент інерції відносно осі обертання, що проходить через центр мас, \({v_c}\) – швидкість руху центра мас.
Корисно звернути увагу на те, що формули кінетичної енергії обертального руху твердого тіла (7.24) і (7.24а) є аналогами формул (6.7) і (6.7а) кінетичної енергії руху матеріальної точки чи поступального руху твердого тіла. Ця аналогія поширюється й на зв’язок між кінетичною енергією та роботою (теорема про кінетичну енергію, (лекція 6, п. 6.2), у чому легко переконатись. Розглянемо роботу, що виконується при обертанні тіла навколо нерухомої осі. В цьому випадку прикладена до тіла сила \(\vec{F}\) є перпендикулярною до осі обертання. При елементарному повороті тіла на кут dφ точка прикладання сили А здійснює переміщення \({\mathrm{d}\vec{s}}\) по колу радіуса R (рис. 7.7), і сила виконує роботу \(\delta{A}=\vec{F}\cdot\mathrm{d}\vec{s}=F\mathrm{d}s\cos\alpha \). У цьому виразі ds = Rdφ і F cosα = Fτ – проекція сили \(\vec{F}\) на дотичну до кола, по якому рухається точка А. Отже, врахувавши вираз (7.17а), маємо:
|
\(\delta{A}=F_{\tau}R\mathrm{d}\varphi\,\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\,\,\delta{A}=M_z\mathrm{d}\varphi \). |
(7.26) |
|
|
|

При повороті на скінченний кут
|
\({A=\int\limits_0^{\varphi}M_z\mathrm{d}\varphi}\). |
(7.26а) |
Ці вирази, що визначають роботу моменту сил відносно осі, теж є аналогічними до відповідних виразів (6.1), (6.2) із механіки точки.
Зв’язок між роботою моменту сил і кінетичною енергією обертального руху отримаємо після нескладних викладок, виразивши в (7.26), величину Mz із рівняння (7.18) і врахувавши співвідношення кінематики твердого тіла (2.5):
|
\( \delta{A}=M_{z}\mathrm{d}\varphi =I\beta_{z}\mathrm{d}\varphi =I\beta_{z}\omega_{z}\mathrm{d}{t}=I\omega_{z}\mathrm{d}\omega_{z}=\mathrm{d}\left(\frac{I\omega^{2}}{2}\right) \) \( \Rightarrow \) \( \delta{A}=\mathrm{d}K \)об. |
(7.27) |
При повороті на скінченний кут
|
\({A=\Delta{K}}\)об = \({K}\)об2 - \({K}\)об1. |
(7.27а) |
Отже, теорема про кінетичну енергію зберігає чинність і для обертального руху твердого тіла.
6.6. Гіроскопи
У механізмах і машинах окрім тіл, які обертаються навколо нерухомої осі чи здійснюють плоскі рухи (колеса, маховики, шатуни), використовують і так звані гіроскопи – масивні симетричні обертові тіла, осі обертання яких не є жорстко закріпленими і можуть змінювати напрям під час руху. Строга теорія гіроскопа є досить складною, тому обмежимося лише спрощеним розглядом окремих властивостей гіроскопів.
Зв’язок між векторами \( \vec{L} \) і \( \vec{\omega} \). Визначимо вектор моменту імпульсу \(\vec{L}\) симетричного однорідного тіла, яке обертається зі сталою кутовою швидкістю \(\vec{\omega}\) навколо закріпленої осі, що збігається з його віссю симетрії. Для цього розглянемо сумарний момент імпульсу \({\Delta\vec{L}_i}\) будь-якої пари однакових симетричних частинок тіла масами Δmi, які мають швидкості \({\vec{v}_i}\) та \({\vec{v}_i{'}}={-\vec{v}_i}\) (рис 7.8):
\( \Delta \vec{L_{i}}=\left[ {{{\vec{r}}}_{i}},\Delta {{m}_{i}}{{{\vec{v}}}_{i}} \right]+\left[ {{{\vec{r}}}_{i}}^{\prime },\Delta {{m}_{i}}{{{{\vec{v}}'}}_{i}} \right] \) = \( \left[ {{{\vec{r}}}_{i}},\Delta {{m}_{i}}{{{\vec{v}}}_{i}} \right]-\left[ {{{\vec{r}}}_{i}}^{\prime },\Delta {{m}_{i}}{{{\vec{v}}}_{i}} \right] \) = \( \left[ \left( {{{\vec{r}}}_{i}}-{{{\vec{r}}}_{i}}^{\prime } \right),\Delta m\vec{v} \right]=\left[ {{{\vec{r}}}_{i{i}'}},\Delta m\vec{v} \right] \).

Оскільки вектор \(\vec{r}_{i}{'}=\left(\vec{r}_i-\vec{r}_i{'}\right) \) лежить на діаметрі кола, по якому рухаються частинки (див. рис. 7.9а), вектор їхнього сумарного моменту імпульсу \(\Delta {{\vec{L}}_{i}}\) за напрямом збігається з вектором кутової швидкості тіла \(\vec{\omega}\). Із подібних парних елементів складається все симетричне тіло, тому його повний момент імпульсу а \(\vec{L}\) напрямлений так само. В такому разі, враховуючи (7.16), маємо:
|
\(\vec{L}=I\vec{\omega}\). |
(7.28) |
|
|
|

Отже, вектор моменту імпульсу симетричного тіла, що обертається навколо закріпленої осі симетрії, дорівнює добутку його моменту інерції відносно цієї осі на вектор кутової швидкості і не залежить від положення точки відліку на осі обертання. Якщо ж вісь обертання не збігається з віссю симетрії тіла, то вектор \( \vec{L} \) складає якийсь кут α з вектором \( \vec{\omega } \) (рис. 7.9б). Тому, обертаючись разом із тілом, вектор \( \vec{L}\) описує конус, а його кінець рухається по колу в перпендикулярній до осі обертання площині. Отже, вектор моменту імпульсу тіла за будь-який елементарний проміжок часу dt набуває приросту, вектор якого \( \mathrm{d}\vec{L}\) є дотичним до цього кола і перпендикулярним до осі обертання. У відповідності до рівнянням (7.6), це означає, що на тіло діє певний момент сил однакового з \( \mathrm{d}\vec{L} \) напрямку. Він створюється поперечними силами реакції опор (підшипників) \( {\vec{F}}'\) і \({\vec{F}}''\), які виникають через асиметричність розподілу маси тіла відносно осі обертання. Відповідно, з боку осі на підшипники діють такі самі сили протилежного напрямку, котрі можуть призвести до швидкого зносу чи навіть руйнування підшипників і спричинюють шкідливі вібрації пристрою, в якому закріплені підшипники. Тому при виготовленні обертових деталей та вузлів механізмів і машин забезпечують їхнє балансування, тобто максимально симетричний розподіл маси відносно осі обертання.
Вільний зрівноважений гіроскоп.
Як говорилося, гіроскопом називається масивне симетричне тіло (маховик), що може обертатися з великою швидкістю навколо осі симетрії. Зазвичай гіроскоп уміщують у так званий кардановий підвіс, який являє собою систему з трьох концентричних рухомих кілець[9] (рис. 7.10а). Маховик і кільця можуть вільно обертатися навколо взаємно перпендикулярних осей АА', ВВ' і DD' (рис.7.10б), що забезпечує можливість орієнтації осі гіроскопа АА' у будь-якому напрямі. Тому гіроскоп у кардановому підвісі називається вільним гіроскопом. Зазвичай одна з точок осі гіроскопа є закріпленою, і її називають точкою опори гіроскопа. У показаному на рис. 7.10 гіроскопі точкою опори є спільний центр кілець. Нарешті, якщо точка опори збігається з центром мас маховика, то гіроскоп називають зрівноваженим.
  |
Очевидно, що сума моментів усіх зовнішніх сил, які діють на вільний зрівноважений гіроскоп, дорівнює нулю. Тому, згідно із законом збереження моменту імпульсу, напрям осі гіроскопа буде лишатися незмінним навіть, якщо його каркас буде рухатися довільним чином. На цьому базується робота гірокомпаса – приладу, який дозволяє визначати напрям у просторі, не використовуючи магнітне поле Землі.
З властивостями гіроскопа можна познайомитися, переглянувши фільми за наведеними нижче посиланнями
Гіроскопічний ефект.
Якщо на гіроскоп почне діяти зовнішній момент сил, то його момент імпульсу буде змінюватись у відповідності до рівняння моментів (7.7):
|
\(\mathrm{d}\vec{L}=\vec{M}\mathrm{d}t\). |
(7.29) |
При цьому вісь гіроскопа поводиться досить несподівано. Якщо у зображеному на рис. 7.11а вільному зрівноваженому гіроскопі (кардановий підвіс не показано) спробувати повернути вісь гіроскопа АА' за годинниковою стрілкою навколо перпендикулярної до неї горизонтальної осі ВВ', приклавши дві антипаралельні сили (пару сил) \({{\vec{F}}_{1}}\) – \({{\vec{F}}_{2}}\), то всупереч очікуванням вісь гіроскопа повернеться не у вертикальній площині навколо горизонтальної осі ВВ', а в горизонтальній площині навколо вертикальної осі DD'. Така поведінка осі гіроскопа під дією зовнішніх сил називається гіроскопічним ефектом. Хоча цей ефект важко сприймається, він прямо випливає з рівняння моментів. Справді, прикладена пара сил створює відносно точки опори гіроскопа О момент \(\vec{M}\), який за правилом правого гвинта напрямлений уздовж горизонтальної осі ВВ' (рис. 7.11а). Тож за з рівнянням (7.29) такий самий напрям має і вектор приросту моменту імпульсу гіроскопа \(d\vec{L}\). А це означає, що вектор \(\vec{M}\), а з ним і вісь гіроскопа АА' , повертається в горизонтальній площині навколо вертикальної осі DD ′.
|
|

Уявімо тепер тепер, що кільце, в діаметральних точках якого А, А' зафіксована в підшипниках вісь гіроскопа, розташоване горизонтально і рівномірно обертається в підшипниках навколо вертикальної осі DD ′ (рис 7.11б). Тоді разом із кільцем у горизонтальній площині обертається і вісь гіроскопа АА′ та вектор його моменту імпульсу \(d\vec{L}\). Позаяк він залишається в горизонтальній площині, вектор його приросту \(d\vec{L}\) теж обертається в горизонтальній площині і є перпендикулярним до \(\vec{L}\), тобто до осі гіроскопа. Згідно з (7.29), це означає, що при вимушеному обертанні осі гіроскопа на нього діє якийсь напрямлений горизонтально момент сил . Цей момент створюється вертикальними силами реакції , в підшипниках осі гіроскопа (рис. 7.11б). У свою чергу такі самі протилежно напрямлені сили і діють з боку осі на підшипники. Ці сили називають гіроскопічними силами, а створюваний ними момент – гіроскопічним моментом. Значні гіроскопічні сили виникають, наприклад, у підшипниках масивних роторів турбін кораблів при різких змінах курсу та у штормову погоду, або в підшипниках карданних валів автомобілів на крутих віражах, що може призвести до руйнування підшипників.
Але гіроскопічний ефект знаходить і корисні застосування зумовлені тим, що гіроскоп чинить спротив зміні напрямку осі обертання. Приміром, масивні гіроскопи використовують для стабілізації положення корабля, або вагонів монорейкової залізниці. Прояви гіроскопічного ефекту спостерігаються й при їзді на велосипеді чи мотоциклі, позаяк колеса швидко обертаються і “працюють” як гіроскопи. Це не дає байкеру падати при русі по прямій. При поворотах він також використовує гіроскопічний ефект. Відхиляючись при повороті від вертикалі, велосипедист повертає вісь переднього (кермового) колеса у вертикальній площині навколо напрямку руху, внаслідок чого виникає гіроскопічний момент, який повертає вісь колеса в горизонтальній площині, спонукаючи велосипед повертати в бік нахилу велосипедиста.
Прецесія гироскопа
Ще одним проявом гіроскопічного ефекту є так званий прецесійний рух осі гіроскопа, або просто прецесія. Розглянемо це явище на прикладі відомої дитячої іграшки дзиґи – симетричного тіла, яке може швидко обертатись навколо власної осі на горизонтальній опорі як незрівноважений гіроскоп. Поставлена вертикально нерухома дзиґа неодмінно завалюється під дією сили тяжіння. Але розкручена дзиґа не падає навіть якщо відхилена – її вісь описує конус навколо вертикалі (рис. 7.12). Такий рух називається прецесією осі.
Поведінка осі дзиґи принципово не відрізняється від поведінки осі зрівноваженого гіроскопа і повністю пояснюється рівнянням моментів . Справді, сила тяжіння \(m\vec{g}\) , яка прикладена в центрі мас дзиґи, створює зовнішній момент \(\vec{M}\) відносно точки опори О. Вектор \(\vec{M}\), тож і вектор приросту моменту імпульсу \(d\vec{L}\) , весь час є перпендикулярними до вертикальної площини, в якій лежить вісь дзиґи та збіжний із нею за напрямом вектор \(d\vec{L}\). Тому вектор моменту імпульсу та вісь дзиґи під дією сили тяжіння не наближаються до площини точки закріплення, а прецесують – описують конуси навколо вертикалі ОZ із незмінним кутом розкриття. (Насправді через неодмінну наявність тертя в точці О та опору повітря обертання дзиґи буде поступово уповільнюватись, а кут α – зростати, і згодом дзиґа таки впаде).
Знайдемо кутову швидкість (частоту) прецесії Ω, скориставшись рис. 7.12 (початок вектора \(\vec{L}\) знаходиться в т. О). За час dt кінець вектора \(\vec{L}\) рухається навколо осі ОZ по колу радіуса Lsinα і за час dt повертається на кут dφ = dL/Lsinα . А за рівнянням моментів dL = Mdt . Звідси для кутової швидкості прецесії
Ω = dφ/dt виходить:
|
\(\Omega=\frac{M}{L\sin\alpha}\). |
(7.30) |
|
|
|

Модуль моменту сили тяжіння відносно точки О дорівнює добутку її величини на відстань від центра мас дзиґи до осі OZ (плече), отже, у виразі (7.30) M = mgbsinα, де b – відстань від точки опори О до центра мас дзиґи С. Урахувавши також, що модуль моменту імпульсу \({L=I\omega}\), де ω – кутова швидкість обертання дзиґи навколо власної осі, отримаємо вираз кутової швидкості прецесії дзиґи
|
\(\Omega=\frac{mgb}{I\omega}\). |
(7.31) |
Варто зауважити, що завдяки прецесії кожна точка гіроскопа, крім обертання навколо власної осі із кутовою швидкістю ω, рухається ще і з кутовою швидкістю прецесії Ω навколо осі, що проходить через точку опори. Тому використаний при виведенні формули (7.31) вираз є наближеним. Але при великій частоті обертання Ω << ω, і похибка є неістотною.
Зрозуміло, що вираз (7.30) чинний не лише для дзиґи, на яку діє момент сил тяжіння, а й для будь-якого незрівноваженого гіроскопа, що перебуває під дією зовнішнього моменту сил \(\vec{M}\). Тому доцільно співвідношення (7.30) записати векторно в загальному вигляді. Урахувавши напрямки векторів \(\vec{L}\), \(\vec{M}\) і \(\vec{\Omega}\), отримаємо:
|
\( M=\Omega L\sin\alpha\,\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\,\,\vec{M}=\left[\vec{\Omega},\vec{L}\right]\). |
(7.32) |
Із цього виразу випливає цікава особливість прецесійного обертання осі гіроскопа: зовнішній момент сил визначає не кутове прискорення, як для "звичайного" тіла, а саму кутову швидкість прецесії. Отже, щойно зникає зовнішній момент, одразу припиняється й прецесія. Тому таку прецесію називають вимушеною.
6.7. Контрольні запитання
1. Що називається моментом імпульсу матеріальної точки? Твердого тіла?
2. Частинка маси m, що лежить на осі ОZ у точці \({x=l}\), починає рухатися паралельно до осі ОХ із заданим сталим прискоренням \(\vec{a}=a\vec{i}\). Записати вираз вектора моменту імпульсу \(\vec{L}\) частинки відносно початку координат і модуля L цього вектора.
3. Відомо, що сума імпульсів усіх частинок системи відносно центра мас дорівнює нулю. Чи стосується це й моменту імпульсу?
4. Що називається моментом сили відносно точки? Від чого залежить модуль цього вектора?
5. Дві антипаралельні сили однакової величини називаються парою сил. Довести, що момент пари сил не залежить від положення точки, відносно якої він визначається. Від чого залежить модуль моменту пари сил?
6. Сума всіх внутрішніх сил у будь-якій системі дорівнює нулю. Чи це так і для суми моментів цих сил?
7. Що називається моментом імпульсу відносно осі? Якою формулою визначається момент імпульсу відносно осі для твердого тіла?
8. Що таке момент інерції тіла? Який фізичний зміст цієї величини?
9. Чи має задане тіло якийсь момент інерції? Чи має його нерухоме тіло відносно заданої осі ?
10. У чому полягає теорема Штайнера? Яке вона має практичне призначення?
11. Що називається моментом сили відносно осі? Як він обчислюється?
12. Що таке плече сили? Чи можна сказати, що модуль моменту сили відносно осі дорівнює добутку модуля сили на її плече?
13. Чи можна твердити, що під дією заданої сили більш масивне тіло отримає менше кутове прискорення, ніж менш масивне? Чому?
14. Записати вирази кінетичної енергії тіла, що обертається навколо нерухомої осі.
15. Записати вирази кінетичної енергії тіла, що здійснює плоский рух.
16. Як обчислюється робота моменту сили?
17. Коли виконується та як записується закон збереження моменту імпульсу відносно осі? Наведіть прояви цього закону.
18. У чому полягає гіроскопічний ефект? Як він пояснюється?
19. Що таке прецесія гіроскопа? Від чого та як залежить кутова швидкість прецесії?
7. СПЕЦІАЛЬНАЯ ТЕОРІЯ ВІДНОСНОСТІ. КІНЕМАТИКА
Ще на самому початку (див. ВСТУП) говорилося про те, що закони класичної механіки є чинними лише для повільних рухів тіл. При швидких рухах усі співвідношення кінематики й динаміки суттєво змінюються й визначаються законами спеціальної теорії відносності (СТВ), створеної на початку 20-го сторіччя А. Ейнштейном. Причина обмеженості механіки Ньютона виявилася дуже глибокою й пов’язаною із складнішими, ніж уважалося, властивостями самого простору та часу. Тому СТВ по суті трактує про фізичні властивості простору й часу в інерціальних системах відліку.
Далі розглянуті наступні питання:
7.1. Принцип відносності Галілея
7.2. Постулати СТВ, відносність простору та часу
7.3. Перетворення Лоренца
7.4. Перетворення швидкостей в СТВ, гранична швидкість
7.5. Інтервал
7.6. Контрольні запитання
7.1. Принцип відносності Галілея
Простір і час у класичній механіці
Простір і час є фундаментальними і всеосяжними сутностями буття – все існує й усе відбувається в просторі та часі. При всьому тому простір і час самі є фізичним об’єктом, який виявляє себе через взаємне розташування тіл і відстані між ними та через послідовність подій і тривалість процесів і станів. Наукові уявлення про властивості простору та часу сформувалися на основі спостережень і дослідів і найнаочніше відображені в основних поняттях і законах механіки. Зокрема, такими основними властивостями є однорідність й ізотропність простору та однорідність часу, про що свідчить незалежність законів і рівнянь механіки в заданому типі систем відліку від положення початку координат і напрямку координатних осей та від вибору початку відліку часу. Крім того, класична фізика виходить з уявлення про абсолютність і незалежність простору та часу, що відображено в перетвореннях Галілея (1.30), (1.30а) і (1.31). Це може здатися дивним, оскільки галілеєві перетворення говорять про відносність положення тіла в просторі: \(\vec{r}\ne\vec{r}' \). Але це свідчить лише про те, що в просторі не існує якоїсь особливої виділеної точки, відносно якої слід фіксувати положення всіх тіл. Але взаємне розташування тіл і відстані між ними, які, власно, й відображають властивості простору, є абсолютними. Справді, з рис. 8.1 видно, що положення точки 1 відносно точки 2 визначається радіусом-вектором \( \vec{r}_{12}=\vec{r}_1-\vec{r}_2 \), який, згідно з (1.30) або (1.30а), не змінюється при переході від однієї системи відліку до іншої, тобто, є інваріантом перетворень Галілея:
|
\( \vec{r}_{12}=\vec{r}_{1}-\vec{r}_{2}\) = \((\vec{r}_{1}^{\prime}+\vec{V}t)-(\vec{r}_{2}^{\prime}+\vec{V}t)\) = \(\vec{r}_{1}^{\prime}-\vec{r}_{2}^{\prime}=\vec{r}_{12}^{\prime}\). |
(8.1) |
|
|
|

Отож і відстань між двома точками \({l}=\left|\vec{r}_{12}\right| \) є інваріантною, тобто абсолютною величиною:
|
l = l′. |
(8.1а) |
Указані інваріанти перетворень Галілея відображають концепцію абсолютного простору, тобто, єдиного для всього Всесвіту й ні від чого не залежного “вмістилища речей”.
Так само класична фізика виходить і з концепції єдиного і ні від чого не залежного абсолютного часу, котра безпосередньо закладена в перетворення Галілея (1.31):
t = t′.
Принцип відносності Галілея
Іншою абсолютною кінематичною величиною (інваріантом перетворень Галілея) в класичній механіці є відносна швидкість (швидкість руху одного тіла відносно іншого), що визначається виразом
|
\(\vec{v}_{12}=\frac{\mathrm{d}\vec{r}_{12}}{\mathrm{d}t}=\vec{v}_1-\vec{v}_2 \). |
(8.2) |
Згідно з (8.1), величина \(\mathrm{d}\vec{r}_{12}\) не змінюється при переході від однієї системи відліку до будь-якої іншої, отже, \( \mathrm{d}\vec{r}_{12}=\mathrm{d}\vec{r}_{12}^{\prime}\), і відносна швидкість також є інваріантом перетворень Галілея:
|
\({{\vec{v}}_{12}}={{\vec{v}}'_{12}}\) |
(8.3) |
В інерціальних системах відліку (ІСВ) інваріантом перетворень Галілея є також прискорення: \(\vec{a}={\vec{a}}'\). Це випливає з означення (1.6) і формул (1.33) і (1.33а), оскільки для ІСВ \(\vec{V}=\mathrm{const}\).
З іншого боку (див. Лекція 3, п. 3.2) сила взаємодії між тілами, загалом, залежить тільки від їхнього взаємного положення та відносної швидкості. Тому сила взаємодії теж є інваріантом перетворень Галілея – вона однакова в усіх інерціальних системах відліку: \( \vec{F}′=\vec{F}\). Те саме можна сказати й про масу, оскільки вона є внутрішньою властивістю тіла: m′ = m. Як наслідок, інваріантом перетворень Галілея виявляється й основне рівняння класичної механіки – рівняння другого закону Ньютона. Це означає, що в усіх інерціальних системах відліку рух матеріальної точки визначається одними й тими самими рівняннями (3.3) і (3.7). Звідси випливає принцип відносності Галілея або принцип відносності класичної механіки:
за однакових умов у всіх інерціальних системах відліку всі механічні явища відбуваються однаково.
Тому ніякими механічними дослідами всередині даної ІСВ неможливо встановити рухається вона, чи перебуває у спокої.
Таким чином, принцип відносності Галілея проголошує повну еквівалентність усіх інерціальних систем відліку щодо механічних явищ.
7.2. Постулати СТВ, відносність простору та часу
Закони Ньютона й перетворення Галілея, що складають фундамент всієї класичної механіки, ґрунтуються на уявленні про взаємну незалежність простору і часу та їх абсолютність. Такі уявлення при розгляді руху тіл з малими швидкостями є цілком виправданими, про що свідчить як успішний розвиток самої класичної механіки, так і всіх її інженерних застосувань. Достатньо нагадати блискучі успіхи в галузі космічної навігації.
Однак у другій половині XIX сторіччя після створення Максвеллом класичної електродинаміки й відкриття електромагнітних хвиль, до яких належить і світло, з’ясувалося, що електромагнітні процеси не задовольняють перетворення Галілея. Так у дослідах було неспростовно встановлено, що швидкість світла у вакуумі, всупереч перетворенням Галілея, не залежить від швидкості руху ані джерела, ані приймача. Ці та інші факти в решті решт призвели до радикального перегляду багатьох фундаментальних положень класичної механіки і створення А. Ейнштейном нової механіки - спеціальної теорії відносності.
Незалежність швидкості світла від руху джерела та приймача (“спостерігача”) означає, що вона однакова в усіх системах відліку. Звідси випливає висновок, що не лише механічними, а й електромагнітними дослідами неможливо розрізнити рух або спокій будь-якої інерціальної системи відліку. На підставі цього А. Ейнштейн поширив принцип відносності на всі фізичні явища і прийняв його за один із постулатів (вихідних положень) нової механіки – принцип відносності Ейнштейна:
усі фізичні процеси за однакових умов протікають однаково в усіх інерціальних системах відліку; всі закони природи та рівняння, що їх описують, інваріантні, тобто не змінюються при переході від однієї інерціальної системи відліку до іншої.
Іншими словами,
всі інерціальні системи відліку є повністю рівноправними (еквівалентними): ніякими дослідами неможливо виділити жодну з них як головну.
Другий постулат СТВ стосується швидкості світла. Доконаний факт її незалежності від руху джерела та приймача не випливає як наслідок з будь-яких логічних міркувань і має розглядатись як фундаментальний закон природи. Тому Ейнштейн прийняв його як другий постулат СТВ – принцип сталості швидкості світла:
швидкість світла у вакуумі не залежить від руху джерела світла і однакова у всіх напрямах.
Це означає, що
швидкість світла у вакуумі однакова в усіх системах відліку.
Отже швидкість світла посідає особливе місце в природі. На відміну від інших швидкостей, скажімо, швидкості звуку, що змінюються при переході від однієї системи відліку до іншої, швидкість світла у вакуумі є інваріантною величиною.
Прийняті Ейнштейном постулати СТВ стоять на міцному фундаменті експерименту – на сьогодні немає жодного дослідного факту, який би їм суперечив. У той же час аналіз цих постулатів призводить до дуже несподіваних для класичної фізики висновків про відносність і взаємопов’язаність простору та часу.
Відносність часу
Як уже відмічалося, класична фізика трактує час як абсолютний, тобто єдиний і однаковий для всього Всесвіту. Тому видавалося самоочевидним, що проміжок часу між двома подіями є однаковим у всіх системах відліку. Зокрема, дві одночасні для даного спостерігача події є таким і для будь-якого іншого спостерігача (абсолютність одночасності). Але таке уявлення не сумісне з постулатами СТВ, у чому можна переконатися на наступному позірному експерименті. Примітка. Позірним експериментом називають уявний дослід, який не суперечить законам фізики, але реально не може бути здійсненим. Позірний експеримент широко використовується у фізиці як один із способів доведення.

Уявімо довгий стержень, посередині якого розташована лампочка Л, а на кінцях – фотоелементи Ф1 та Ф2 (рис. 8.2). Стержень рухається відносно спостерігача, що знаходиться в точці О. Нехай лампочка, коли порівняється з т. О, на мить спалахує (посилає світловий сигнал). В системі відліку, пов’язаній із стержнем, світловий сигнал доходить до фотоелементів за один і той самий час, оскільки він поширюється в обох напрямках з однаковою швидкістю й проходить однакову відстань. Тому в системі відліку стержня спрацьовування фотоелементів є двома одночасними подіями. Але нерухомий спостерігач в точці О зафіксує зовсім інше. Для нього швидкість світла також однакова в обох напрямках, оскільки вона не залежить від руху джерела. Але відстані, які пройде світло до фотоелементів, будуть різними, оскільки фотоелемент Ф1 рухається назустріч світловому імпульсу, а Ф2 “тікає” від нього. Отже, для нерухомого спостерігача фотоелемент Ф1 спрацює раніше, ніж Ф2. Таким чином, із постулатів СТВ незаперечно випливає висновок про відносність одночасності віддалених, тобто таких, які відбуваються в різних точках простору, подій:
дві події, одночасні в даній системі відліку, не є такими в інших системах відліку, що рухаються відносно даної.
|
|

Відносність одночасності означає відносність самого плину часу в різних системах відліку. Це можна побачити із ще одного позірного експерименту, запропонованого Ейнштейном (рис. 8.3). Нехай маємо вертикальний стержень АВ на кінцях якого закріплені два горизонтальні дзеркала, між якими „бігає” короткий світловий імпульс. Уявімо, що стержень рухається горизонтально зі швидкістю V, і визначимо час пробігу імпульсу від одного дзеркала до іншого й назад в системі відліку стержня K′ і в нерухомій системі відліку К, відносно якої стержень рухається з указаною швидкістю V. Очевидно, що в K′-системі цей час дорівнює
|
\( \Delta{t}_0=\frac{2l_0}{c} \), |
(8.4) |
де l0 = AB - відстань між дзеркалами в K′-системі відліку, в якій стержень є нерухомим, c – швидкість світла. Але в К-системі відліку, відносно якої стержень рухається, світловий імпульс відбивається від дзеркала B в точці B1 і повертається до дзеркала A в точці A2. Отже, за половину часу пробігу він проходить відстань l = AB1, яка пов’язана з відстанями AA1 та A1B1 очевидним співвідношенням (AB1)2 = (AA1)2 + (A1B1)2 . Так само очевидно, що AA1 = VΔt / 2, де V - швидкість стержня, Δt – час пробігу світлового імпульсу від нижнього дзеркала до верхнього й назад у К-системі відліку. Що ж до відстані A1B1 у К-системі відліку, вона, як це випливає з принципу відносності, та сама, що і в K′ – l0. Дійсно, аби це було не так, то, зробивши мітку від верхнього кінця стержня, що пролітає, на нерухомій осі АВ К-системи і побачивши, що вона не співпадає з точкою В, ми б узнали, яка з двох систем відліку рухається, а яка перебуває в спокої. Але насправді встановити це принципово неможливо.
На основі сказаного можна записати:
|
\( {l}^2=l_0^2+\left(\frac{V\Delta{t}}{2}\right)^2 \). |
(8.5) |
Швидкість світла в К-системі відліку, як і в K′, дорівнює с, отже \( {l}=c\Delta{t}/{2}\). Підставивши цей вираз в (8.5), дістанемо:
|
\( \left(\frac{c\Delta{t}}{2}\right)^{2}\) = \( l_0^2+\left(\frac{V\Delta{t}}{2}\right)^2\) \(\Rightarrow\) \(\Delta{t}=\frac{2l_0}{c\sqrt{1-(V/c)^2}} \). |
(8.6) |
Порівнюючи цей вираз із (8.4), знаходимо для двох ІСВ:
|
\( \Delta{t}=\frac{\Delta{t}_0}{\sqrt{1-(V/c)^2}} \). |
(8.7) |
Таким чином, одну подію (відбивання імпульсу від дзеркала А) від іншої події (повернення імпульсу на дзеркало А) в різних системах відліку відділяють різні проміжки часу. Це означає, що
час як такий є відносним: його плин у різних системах відліку є не однаковим.
Важливо чітко усвідомити фізичний зміст виразу (8.7). У K′-системі дзеркала нерухомі, отже, час Δt0 виміряно нерухомим відносно подій годинником, а час Δt виміряно годинником К-системи відліку, відносно якої події рухаються зі швидкістю V. Як видно з (8.7), Δt > Δt0, отже спостерігач К-системи відліку дійде висновку, що годинник K′-системи йде повільніше, ніж його власний. У цьому сенсі говорять про уповільнення часу в рухомих системах відліку. При цьому задля однозначності та зручності висловлювань використовують таку термінологію. Систему відліку, в якій дані події відбуваються в нерухомих точках, називають власною системою відліку, а час, який показує нерухомий відносно цієї системи відліку годинник (“власний” годинник) називають власним часом. Будь-яка інша система відліку, відносно якої точки, де відбуваються події, рухаються, називається лабораторною системою відліку, а проміжки часу між такими рухомими подіями, виміряні годинником лабораторної системи відліку, називаються лабораторним часом. Виходячи з цього, можна сказати, що
власний час плине найповільніше
Варто нагадати, що тут слово “годинник” означає не якийсь фізичний прилад, а прийнятий принцип вимірювання проміжків часу. Тому розглянутий ефект уповільнення часу є чисто кінематичним і відображує об’єктивну властивість часу як такого, а саме, його відносність. Це добре видно з такої ситуації. Якщо два спостерігачі в двох різних ІСВ виконають описаний дослід з дзеркалами, то кожен з них абсолютно обґрунтовано буде вважати, що годинник його колеги з іншої системи відліку йде повільніше, ніж його власний. Тож запитання "який з годинників насправді йде повільніше?" позбавлене змісту.
Скорочення поздовжніх розмірів рухомих тіл, відносність простору
Розглянемо ще один позірний дослід. У системі відліку K′ паралельно до осі O′X′ розміщено нерухомий стержень АВ довжини l′ = l0, який разом із K′-системою рухається із швидкістю V відносно нерухомої К-системи відліку (рис. 8.4). Поставимо завдання визначити довжину стержня АВ в К-системі відліку. Спостерігач К-системи може зробити це, вимірявши час прольоту стержня Δtст повз якусь фіксовану точку (наприклад, О) в К-системі відліку. Тоді
|
l = VΔtпр. |
(8.8) |

Видається очевидним, що величина l має збігатися з l0, але насправді це не так. Уявімо, що описану процедуру вимірювання контролює й спостерігач K′-системи, для котрого стержень є нерухомим, а годинник К-системи рухається повз нього із швидкістю V. Отже, він скаже, що спостерігач К-системи вимірює час переміщення свого годинника Δtгод на відстань l0 між кінцями стержня. Тож
| \(\Delta{t}_{год}=(l_{0}/V)\) \(\Rightarrow\) \(l_0=V\Delta{t}_{год}\). | (8.8a) |
А тепер звернімо увагу на те, що у виразах (8.8) і (8.8а) фігурують проміжки часу між тими самими двома подіями: суміщення годинника із одним (подія 1) та другим (подія 2) кінцем стержня. При цьому в К-системі (вираз (8.8)) події відбуваються в одній точці і фіксуються нерухомим відносно неї годинником. Отже Δtст є власним проміжком часу між цими подіями:
Δtст= Δt0.
Натомість величина Δtгод вимірюється рухомим годинником, отже вона є лабораторним проміжком часу між подіями:
Δtгод = Δt.
Так само довжина \(l_0\) нерухомого в K′-системі відліку стержня є його власною довжиною. Відповідно, довжина l стержня в К-системі, в якій він рухається, є лабораторною довжиною. Відтак із зіставлення виразів (8.8) і (8.8а) виходить:
\(\frac{l}{l_0}=\frac{\Delta{t}_0}{\Delta{t}}\),
і з урахуванням співвідношення (8.7)
|
\(l=l_0\sqrt{1-(V/c)^{2}}\). |
(8.9) |
Формула (8.9) виражає так зване лоренцове скорочення довжин: довжина рухомого стержня (лабораторна довжина), у напрямку руху в \(\sqrt{1-(V/c)^2}\) раз менша, ніж його власна довжина. Отже
власні поздовжні розміри предмета є найбільшими.
Лоренцове скорочення, як і уповільнення часу, є кінематичним ефектом. Менше значення поздовжньої довжини рухомого стержня порівняно з нерухомим пояснюється не виникненням у ньому якихось механічних напруг і деформацій, а відносністю самого простору – в різних системах відліку просторові масштаби (величина одиниці довжини) не збігаються.
Слід іще раз наголосити, що в співвідношенні (8.9) величини l і l0 - то є поздовжні розміри тіла (стержня), тобто, розміри в напрямку руху. Що ж до поперечних розмірів тіл, то вони не змінюються, позаяк в обох системах відліку відсутній рух тіла вздовж поперечних осей Y, Y′ та Z, Z′.
Розглянуті радикальні висновки, що випливають із постулатів Ейнштейна, ставлять два очевидних запитання: 1) чому класична механіка, що, як видно, стоїть на принципово хибних уявленнях про простір і час, дозволяє визначати рух тіл із винятково високою точністю, і 2) чи мають експериментальне підтвердження ефекти уповільнення часу (8.7) та скорочення масштабів (8.9)? Відповідь на перше запитання дає масштаб величини c = 3·108 м/с. Для макроскопічних тіл, а класична механіка тільки такі й розглядає, величина с є недосяжною. Навіть найшвидші макроскопічні тіла – космічні тіла і ракети – рухаються із швидкостями не більшими, ніж ~ 104 м/с. При таких швидкостях (V/c)2 ~ 10-8 , і формули (8.7) і (8.9) з величезною точністю дають Δt = Δt0 і l = l0. Тому відносність простору та часу й численні пов’язані з цим релятивістські ефекти стають відчутними лише при гранично високих швидкостях, які, крім світла, притаманні тільки елементарним частинкам високих енергій. Що ж до другого запитання, то відповідь ствердна, причому формула (8.7) підтверджена на тільки опосередковано, а й безпосередніми вимірами.
7.3. Перетворення Лоренца
Відносність простору та часу означає, що перетворення Галілея (1.30), (1.31), (1.32), які відображають концепцію абсолютного простору й абсолютного часу, принципово є помилковими. Треба мати перетворення координат і часу, які задовольняють і постулати Ейнштейна. Їх можна знайти різними способами, наприклад, так.
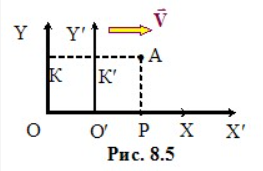
|
\({x=\gamma(x'+Vt')}\), |
(8.10) |
|
|
\({x=\gamma(x'-Vt')}\), |
(8.10а) |
де γ – функціональний множник, що підлягяє визначенню і має наближатися до одиниці при зменшенні швидкості V. В обох співвідношеннях фігурує одна й та сама величина γ, тим самим вони задовольняють принципу відносності (І постулат СТВ), адже обидві системи відліку є повністю рівноправними й відрізняються тільки напрямком відносного руху (знаком проекції \(\vec{V}\)). Через відносність часу перетворення (t, t′) теж не можуть бути тривіальними, оскільки при t = t´ з перетворень (8.10) і (8.10а) виходить γ = 1, і вони переходять у перетворення Галілея. Загальний вигляд перетворень часу можна встановити, якщо підставити в (8.10а) замість координати х її вираз (8.10) і розв’язати отримане рівняння відносно t:
|
\({x'}=\gamma(\gamma(x'+Vt')-Vt)\,\,\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\,\,t=\gamma{t}'-\frac{(1-\gamma^2)x'}{V}\) |
(8.11) |
З урахуванням принципу відносності, зворотне перетворення має вигляд:
|
\({t'}=\gamma{t}+\frac{(1-\gamma^2)x}{V}\). |
(8.11а) |
У цьому можна переконатися, визначивши t′ безпосередньо з (8.11).
Шукані перетворення мають задовольняти ще й умову сталості швидкості світла с (ІІ постулат СТВ). Аби накласти цю умови розглянемо ще один позірний експеримент. Нехай в момент часу t = t’ = 0, коли точки O і O′ збігалися, спалахнула лампочка, закріплена в початку координат якоїсь із даних двох систем відліку. Оскільки швидкість світла в обох системах дорівнює с, поширення світлового сигналу вздовж осей X, X′ описується рівнянням x = ct, і x′ = ct′. Підставивши ці вирази в (8.10) і (8.10а), отримаємо: ct = γ(c + V)t′ i ct′ = γ(c - V)t. Нарешті, перемноживши ліві та праві частини цих виразів, знайдемо, що
|
\(\gamma=\frac{1}{\sqrt{1-(V/c)^2}}\), або \(\gamma=\frac{1}{\sqrt{1-\beta^2}}\), де \(\beta={V/c}\). |
(8.12) |
Підставляючи знайдену величину γ у (8.10), (8.10а) і (8.11), (8.11а) та враховуючи збіг поперечних координат, дістанемо перетворення координат і часу при переході від інерціальної K′-системи відліку до інерціальної К-системи відліку, які задовольняють постулати СТВ і називаються перетвореннями Лоренца:
|
\({x}=\frac{x'+Vt'}{\sqrt{1-(V/c)^2}}=\frac{x'+Vt'}{\sqrt{1-\beta^2}},\,\,\,\,\,\,\,y=y',\,\,\,\,\,\,\,z=z' \); |
||
|
\({t}=\frac{t'+x'V/c^2}{\sqrt{1-(V/c)^2}}=\frac{t'+x'V/c^2}{\sqrt{1-\beta^2}}\). |
(8.13) |
Зворотні перетворення мають вигляд:
|
\({x'}=\frac{x-Vt}{\sqrt{1-(V/c)^2}}=\frac{x-Vt}{\sqrt{1-\beta^2}},\,\,\,\,\,\,\,y'=y,\,\,\,\,\,\,\,\,z'=z \); \({t'}=\frac{t-xV/c^2}{\sqrt{1-(V/c)^2}}=\frac{t-xV/c^2}{\sqrt{1-\beta^2}}\). |
(8.13а) |
Одразу зауважимо таке. При малих швидкостях β << 1, перетворення Лоренца “автоматично” переходять у перетворення Галілея і вступають у силу закони класичної механіки. А при β ≥ 1, (V ≥ c) перетворення Лоренца втрачають фізичний зміст.
7.4. Перетворення швидкостей в СТВ, гранична швидкість
Установимо тепер формули перетворення швидкостей в СТВ, тобто, формули, котрі пов’язують між собою швидкості руху частинки в двох різних системах відліку - нерухомій К-системі та в К′-системі, що рухається відносно К із швидкістю V уздовж осі ОХ. Нехай частинка в К-системі відліку рухається із швидкістю \(\vec{v}\). Її компоненти визначаються, як
|
\(v_{x}=\frac{\mathrm{d}x}{\mathrm{d}t}\) \( v_y=\frac{\mathrm{d}y}{\mathrm{d}t}\) \( v_z=\frac{\mathrm{d}z}{\mathrm{d}t}\) |
(8.15) |
Так само швидкість частинки в K′-системі \(\vec{v}' \) визначається компонентами
|
\({{v'}_x}=\frac{\mathrm{d}x'}{\mathrm{d}t},\,\,\,\,\,\,\,{{v'}_y}=\frac{\mathrm{d}y'}{\mathrm{d}t},\,\,\,\,\,\,\,{{v'}_z}=\frac{\mathrm{d}z'}{\mathrm{d}t}\) |
(8.15а) |
Аби знайти зв’язок між векторами \(\vec{v}' \) і \(\vec{v}\), виразимо переміщення й проміжок часу в (8.15а) через відповідні величини в К-системі відліку. Для цього продиференціюємо співвідношення (8.13)
\(\mathrm{d}{x}'=\frac{\mathrm{d}x-V\mathrm{d}t}{\sqrt{1-{{\left( {V}/{c}\; \right)}^{2}}}}\), \(\mathrm{d}y'=\mathrm{d}y \), \(\mathrm{d}z'=\mathrm{d}z \), \(\mathrm{d}{t}'=\frac{\mathrm{d}t-\frac{V}{{{c}^{2}}}\mathrm{d}x}{\sqrt{1-{{\left( {V}/{c}\; \right)}^{2}}}}\).
Після підстановки цих виразів у (8.15а) і заміни (V/c) = β матимаємо:
\({v'}_x=\frac{\mathrm{d}x-V\mathrm{d}t}{\mathrm{d}t-\frac{V}{c^2}\mathrm{d}x}=\frac{\frac{\mathrm{d}x}{\mathrm{d}t}-V}{1-\frac{V}{c^2}\cdot\frac{\mathrm{d}x}{\mathrm{d}t}}\),
\({{{v}'}_{y}}=\frac{\mathrm{d}y\sqrt{1-{{\beta }^{2}}}}{\mathrm{d}t-\frac{V}{{{c}^{2}}}\mathrm{d}x}\)=\(\frac{\frac{\mathrm{d}y}{\mathrm{d}t}\cdot \sqrt{1-{{\beta }^{2}}}}{1-\frac{V}{{{c}^{2}}}\cdot \frac{\mathrm{d}x}{\mathrm{d}t}}\)
\( {v'}_z=\frac{\mathrm{d}z\sqrt{1-\beta^2}}{\mathrm{d}t-\frac{V}{c^2}\mathrm{d}x}\) = \( \frac{\frac{\mathrm{d}z}{\mathrm{d}t}\cdot \sqrt{1-{{\beta }^{2}}}}{1-\frac{V}{{{c}^{2}}}\cdot \frac{\mathrm{d}x}{\mathrm{d}t}}\).
Урахувавши (8.15), отримаємо остаточно:
|
|
\(v_{x}^{\prime}=\frac{v_{x}-V}{1-\frac{v_{x}V}{c^{2}}}\), \({v'}_y=\frac{v_y\sqrt{1-\beta^2}}{1-\frac{Vv_x}{c^2}}\), \({v'}_z=\frac{v_z\sqrt{1-\beta^2}}{1-\frac{Vv_x}{c^2}}\). |
(8.16) |
|
\({v_x}=\frac{{v'}_x+V}{1+\frac{V{v'}_x}{c^2}}\), \({v_y}=\frac{{v'}_y\sqrt{1-\beta^2}}{1+\frac{V{v'}_x}{c^2}}\), \({v_z}=\frac{{v'}_z\sqrt{1-\beta^2}}{1+\frac{V{v'}_x}{c^2}}\).. |
(8.16а) |
Ці формули виражають релятивістський закон перетворення швидкостей. При малих швидкостях (V << c і v << c) вони трансформуються в класичний закон додавання швидкостей (1.33) і (1.33а), виражений в координатній формі. В цьому зв’язку відмітимо, що y- i z- проекції швидкості частинки в одній системі відліку залежать не тільки від однойменних проекцій в іншій, а й від х-проекції швидкості. Тому для релятивістської частинки неможливо виразити зв’язок між швидкостями безпосередньо у векторній формі.
Гранична швидкість
Визначення за формулами (8.16), (8.16а) величини (модуля) та напрямку швидкості частинки в одній системі відліку через ці характеристики, задані в іншій системі відліку, потребує громіздких викладок. Тому при аналізі загальних наслідків з релятивістського закону перетворення швидкостей для більшої прозорості розглядають випадок руху частинки паралельно до осей X, X′ систем відліку. В такому разі поперечні компоненти швидкості дорівнюють нулю, і величина та напрям швидкості частинки в обох системах відліку визначаються тільки однією проекцією \({v_x}\) або \({{v'}_x}\) (у таких випадках у формулах перетворень швидкості часто опускають індекс проекції). Розглянемо приклади застосування формул (8.16) і (8.16а) за вказаних умов.
Приклад 1. Нехай спостерігач у рухомій K′-системі відліку вимірює швидкість c′ світлового променя, що йде вздовж осі O′X′ від джерела, закріпленого в початку відліку О нерухомої К-системи відліку. В К-системі швидкість променя дорівнює с, тому, згідно з (8.16),
\({c}'=\frac{c-V}{1-\frac{Vc}{{{c}^{2}}}}=c \)
Отже, в обох системах відліку світловий промінь поширюється з однаковою швидкістю. Взагалі, в цьому немає нічого несподіваного, адже в самі перетворення Лоренца, з яких і випливають формули (8.16), вже закладено постулат сталості швидкості світла.
Приклад 2. Із космічної ракети, що віддаляється від Землі зі швидкістю 0,8с, випустили в напрямку руху зонд із швидкістю 0,6с відносно ракети. Визначимо швидкість зонда v відносно Землі. Для цього пов’яжемо із Землею нерухому К-систему відліку, а з ракетою – рухому K′-систему відліку так, щоб осі X, X′ мали напрям руху ракети та зонда. Тоді V = 0,8c i v′ = 0,6c. Підставляємо ці значення у відповідну формулу (8.16а) і отримуємо:
\({v}=\frac{0,6c+0,8c}{1+0,48}\approx0,95c \).
Отже, виходить v < c, тоді як згідно з класичним законом (1.33а) і “здоровим глуздом” мало би вийти 1,4 с.
Приклад 3. Нехай дві елементарні частинки 1 і 2 рухаються назустріч одна одній паралельно осі ОХ К-системи відліку з однаковою швидкістю \({v_1=v_2=nc}\). Визначимо відносну швидкість частинок v, наприклад, швидкість руху другої відносно першої. Для цього перейдемо в K′-систему відліку, котра рухається відносно К із швидкістю першої частинки \({V=v_1}\). Тоді перша частинка є нерухомою, і швидкість другої частинки в цій системі відліку є шуканою її швидкістю відносно першої: \({v'}_2={v}\). Підставляючи значення проекцій швидкостей в (8.16), знаходимо:
|
\( {v}=v_{2x}^{\prime}=\frac{-nc-nc}{1-\frac{nc\cdot{(-nc)}}{c^{2}}}=-\frac{2n}{1+n^{2}}c=-\frac{2c}{\frac{1}{n}+n}\) . |
(8.17) |
Знак “–” відображає те, що частинка 2 рухається назустріч частинці 1. Із цього виразу випливає важливий висновок про те, що за будь-яких умов \({v\le{c}}\). У цьому переконує формальний аналіз виразу (8.17). Справді, при малих швидкостях (n << 1) модуль відносної швидкості v ≈ 2nc зростає при збільшенні n. Але при n >> 1 v ≈ 2c/n і зменшується при зростанні n. Отже, при деякому значенні n = nm відносна швидкість має максимум v = vmax . Значення nm і величину vmax не важко знайти методами вищої математики. А саме, треба взяти похідну від виразу в знаменнику (8.17) і прирівняти її до нуля:
\(\left(\frac{1}{n}+n\right)'=-\frac{1}{n^2}+1\,\,\,\,\,\,\,\Rightarrow\,\,\,\,\,\,\,\,\frac{1}{n_m}=1\,\,\,\,\,\,\,\,n_m=1 \).
Підставляємо це значення в (8.17) і отримуємо для модуля vmax = c .
Таким чином, максимальна можлива швидкість руху однієї частинки (одного тіла) відносно іншої частинки (іншого тіла) дорівнює величині с. Але ж саме поняття руху визначене (тобто, має зміст) тільки по відношенню до якогось іншого тіла (тіла відліку). Тому за будь-яких умов швидкість руху будь-якого тіла
|
\({v}\le{c}\). |
(8.18) |
Інакше говорячи, в природі діє фундаментальний закон граничності швидкості с, який гласить:
швидкість будь-якого матеріального об’єкта ні за яких умов не може бути більшою, ніж величина c = 3·108 м/с .
На цьому слід спеціально наголосити: йдеться про рух матеріальних частинок або поширення випромінювання, тобто, про процеси, що супроводжуються перенесенням енергії і, тим самим, можуть бути використані для передачі сигналів (інформації). На інші швидкості це обмеження не поширюється
Те, що швидкість матеріальних об'єктів не може бути більшою за \(\approx{3}\cdot{10}^8\) м/с, зокрема, пояснює інваріантність швидкості світла у вакуумі: оскільки вона є граничною, то, зрозуміло, не може залежати від системи відліку.
7.5. Інтервал
На основі виразів (8.14) і (8.14а) можна зробити ще один важливий висновок: проміжок часу між двома подіями в одній системі відліку залежить не тільки від відповідного проміжку в іншій системі відліку, а й від відстані між точками, в яких відбулися події. Це свідчить про те, що простір і час є не тільки відносними, а й органічно взаємопов’язаними. Тому слід говорити не про “простір і час”, а про єдиний “простір-час”. Про це свідчить існування кінематичної величини, яка визначається і координатами, і часом, та є інваріантом перетворень Лоренца, тобто, не змінюється при переході від однієї ІСВ до іншої. Ця величина називається просторово-часовим інтервалом s між двома подіями (коротко - інтервалом) і задається співвідношенням
|
\({s}_{12}^2=c^2\Delta{t}_{12}^2-l_{12}^2=c^2(t_1-t_2)^2-\left((x_1-x_2)^2+(y_1-y_2)^2+(z_1-z_2)^2\right)\), |
(8.19) |
де (t1, x1, y1, z1) і (t2, x2, y2, z2) - просторово-часові координати подій.
Інваріантність інтервалу, тобто, що \({s}_{12}^2={s'}_{12}^2 \), можна довести прямими обчисленнями після заміни у виразі інтервалу нештрихованих величин штрихованими на основі (8.14). Інваріантні величини позначають як “inv”, отже можна записати:
|
\({s}_{12}^2=c^2\Delta{t}_{12}^2-l_{12}^2=\mathrm{inv}\). |
Таким чином, твердження, що дві події розділені заданим інтервалом має абсолютний характер – воно справедливе для будь-якої інерціальної системи відліку.
Інваріантні величини в теорії відносності мають велике теоретичне та практичне значення. Зауважимо також, що, крім інтервалу, кінематичними інваріантами перетворень Лоренца є гранична швидкість с, а також власний проміжок часу Δt0 і власна довжина l0.
В залежності від того, яка складова інтервалу переважає, інтервали поділяють на простороподібні (l12 > cΔt12), часоподібні (cΔt12 > l12) та світлоподібні (l12 = cΔt12).
Якщо інтервал між двома подіями є простороподібним, то завжди можна знайти таку систему відліку K′, в якій обидві події відбуваються одночасно (Δt12 = 0):
\({c^2}\Delta{t}_{12}^2-l_{12}^2={l'}_{12}^2 \).
Якщо ж інтервал часоподібний, то завжди можна знайти таку систему відліку K', в якій обидві події відбуваються в одній точці (\({l'}_{12}=0 \)):
\({c^2}\Delta{t}_{12}^2-{l}_{12}^2=c^2\Delta{t'}_{12}^2 \)
У випадку простровоподібних інтервалів, коли \({l}_{12}>c\Delta{t}_{12}\), ні в якій системі відліку події не можуть впливати одна на одну, навіть якщо зв’язок між ними здійснювався з граничною швидкістю c. На відміну від цього, у випадку часоподібних або світлоподібних інтервалів, коли \({c}\Delta{t}_{12}\ge{l}_{12}\), події можуть бути пов’язані одна з одною причинно-наслідковим зв’язком.
7.6. Контрольні запитання
- Що спонукало створення спеціальної теорії відносності?
- Сформулюйте постулати Ейнштейна.
- У чому полягає відміна між принципом відносності Ейнштейна та принципом відносності Галілея?
- Які висновки про властивості простору й часу випливають із постулатів Ейнштейна?
- На підставі яких міркувань можна твердити, що поперечні координати точки в різних системах відліку однакові?
- Що таке власна та лабораторна довжина стержня? Як вони пов’язані між собою?
- Що таке власний та лабораторний проміжок часу? Як вони пов’язані між собою?
- На основі чого можна зробити висновок про те, що простір і час не є незалежними одне від одного ?
- Чому говорять, що скорочення поздовжньої довжини тіла та скорочення проміжку часу між подіями є взаємними ефектами?
- Що таке релятивістський інтервал між подіями? Які бувають типи інтервалів?
- При якому типі інтервалу між подіями не може бути причинно-наслідкового зв’язку?
- Згідно з перетвореннями Лоренца, поперечні координати (y; z) рухомої точки в різних ІСВ однакові. Чому ж тоді не однакові поперечні проекції швидкості (vy, vz)?
- Який зв’язок існує між формулами СТВ і відповідними формулами класичної механіки?
- У чому полягає закон про граничну швидкість?
- Що ми спостерігали б навколо себе, якби гранична швидкість була рівною с = 50 км/год?
- Чи існували би релятивістські ефекти за відсутності в природі будь-яких обмежень на величину швидкості?
- Виробник твердить, що в його телевізорах електронний промінь “біжить” по екрану кінескопа із швидкістю 5·108 м/с. Чи таке можливо?
- Із молекулярної фізики відомо, що температура є прямо пропорційна середній кінетичній енергії теплового руху молекул речовини. А в СТВ показано, що існує верхня межа швидкості – с. Чи означає це, що існує й верхня межа можливих значень температури?
8. СПЕЦІАЛЬНА ТЕОРІЯ ВІДНОСНОСТІ. ДИНАМІКА
Зміна в СТВ поглядів практично на всі основні поняття й величини кінематики вимагає аналізу та ревізії й основних понять і положень класичної динаміки. Це, зокрема стосується поняття імпульсу, зв’язку між силою та прискоренням, поняття енергії, тощо.
Нижче мова піде про таке:
8.1. Релятивістський імпульс і релятивістська маса
8.2. Основне рівняння релятивістської динаміки
8.3. Енергія та маса
8.4. Контрольні запитання
8.1. Релятивістський імпульс і релятивістська маса
Одна з основних величин динаміки – мпульс частинки – в класичній механіці визначається як добуток маси на швидкість (3.2). При цьому маса виражає внутрішню властивість – інертність частинки і є інваріантною (незалежною від системи відліку) величиною. Велике значення поняття імпульсу в теорії зумовлене тим, що для нього виконується універсальний закон збереження (5.2). Цей закон трактує про поведінку імпульсу замкненої сукупності тіл всередині даної інерціальної системи відліку й ніяк не пов’язаний із переходом від однієї системи відліку до іншої. Тому він виконується і в релятивістській механіці. Однак, як показує аналіз, імпульс більш складно, ніж уважалося, залежить від швидкості й визначається формулою:
|
\( \vec{p}=\frac{m\vec{v}}{\sqrt{1-(V/c)^{2}}}\). |
(9.1) |
Отже, імпульс нелінійно залежить від швидкості частинки, але, як видно з (9.1), це стає помітним лише при релятивістських (сумірних із с) швидкостях. Тому величину (9.1) називають релятивістським імпульсом. При малих швидкостях цей вираз переходить у класичну формулу (3.2).
Інколи буває зручно записувати вираз релятивістського імпульсу згорнуто у вигляді
|
\( \vec{p}=m_{r}\vec{v}\), |
(9.1а) |
де величина
|
\( {m}_{r}=\frac{m}{\sqrt{1-(V/c)^{2}}}\) |
(9.2) |
називається релятивістською масою частинки. В такому контексті власну масу частинки m називають масою спокою. Слід одразу зазначити, що поняття релятивістської маси, яке збереглося з початкового періоду становлення СТВ, є формальним і не має визначеного фізичного змісту. Зокрема, величину mr не можна розглядати як міру інертності рухомого тіла.
8.2. Основне рівняння релятивістської динаміки
Із виразу релятивістського імпульсу (9.1) зрозуміло, що \( \mathrm{d}\vec{p}/\mathrm{d}y\ne{m}\vec{a}\), отже, для релятивістської частинки другий закон Ньютона у формі \( {m}\vec{a}=\vec{F}\) не виконується. Але, як доведено, основне рівняння динаміки в більш загальній формі (3.3) зберігає чинність і в СТВ:
|
\( \frac{\mathrm{d}\vec{p}}{\mathrm{d}t}=\vec{F}\). |
(9.3) |
Само собою, в основному рівнянні релятивістської динаміки (9.3) фігурує релятивістський імпульс. Розгорнуто воно записується так:
|
\( \frac{\mathrm{d}}{\mathrm{d}t}\left(\frac{m_{0}\vec{v}}{\sqrt{1-(v/c)^{2}}}\right)=\vec{F}\). |
(9.3а) |
Рівняння (9.3) можна подати й через релятивістську масу:
|
\( \frac{\mathrm{d}(m_{r}\vec{v})}{\mathrm{d}t}\vec{F} \). |
(9.3б) |
Рівняння (9.3) і (9.3б), начебто, такі самі, як і в класичній механіці, але це лише видимість. Насправді для релятивістської частинки немає прямого зв’язку між величиною сили та прискоренням. В цьому легко переконатись, якщо виконати диференціювання в (9.3б), взявши до уваги, що mr теж залежить від часу:
|
\( {m}_{r}\vec{a}+\vec{v}\frac{\mathrm{d}m_{r}}{\mathrm{d}t}=\vec{F}\), |
(9.4) |
де \( \vec{a}=\frac{\mathrm{d}\vec{v}}{\mathrm{d}t}\) – прискорення частинки. При цьому, позаяк другий доданок у лівій частині рівняння (9.4) за напрямом не збігається з \( \vec{F}\) (див. рис 9.1), то й напрям прискорення частинки \(\vec{a}\) теж не збігається з напрямом сили, що діє на неї. Є лише два винятки з такої неординарної поведінки релятивістської частинки: 1) діюча на частинку сила поперечна \(\vec{F}\bot \vec{v}\) і 2) сила поздовжня \(\vec{F}\parallel \vec{v}\).
|
|

У першому випадку сила не виконує роботи, отже, рух є рівномірним і mr = const. Тому
|
\({{m}_{r}}\vec{a}=\vec{F}\quad \Rightarrow \quad \frac{m\vec{a}}{\sqrt{1-{{\left( {v}/{c}\; \right)}^{2}}}}=\vec{F}\)
|
(9.4а) |
У другому випадку рух частинки є прямолінійним і, як можна показати, виконавши диференціювання в (9.3а),
|
\(\frac{m\vec{a}}{{{\left( 1-{{\left( {v}/{c}\; \right)}^{2}} \right)}^{{3}/{2}\;}}}=\vec{F}\)
|
(9.4б) |
Отже, в цих двох випадках прискорення частинки має напрям діючої на неї сили, а рівняння (9.4а) і (9.4б) нагадують рівняння другого закону Ньютона (3.5). Тому в них множники при прискоренні іноді називають поперечною та поздовжньою масою, відповідно. В такому сенсі можна говорити, що сила дорівнює добутку маси на прискорення. Проте це не означає, що виконується другий закон Ньютона, оскільки прискорення не є прямо пропорційним діючій на частинку силі. Зокрема, з рівняння (9.4б) видно, що при дії сталої сили прискорення частинки, через зростання швидкості, буде невпинно зменшуватися, простуючи до нуля при наближенні швидкості до значення v = с. Отже, з основного рівняння релятивістської динаміки теж випливає висновок про граничний характер швидкості с, який раніше було отримано в кінематиці СТВ (див. Лекція 8, п. 8.4).
Наостанок відмітимо, що при малих швидкостях руху релятивістські рівняння (9.3а), (9.4а) і (9.4б), як завжди, автоматично переходять у відповідне класичне рівняння (3.5).
8.3. Енергія та маса
Усі розглянуті досі результати СТВ стосуються понять і величин, які відомі й у класичній механіці. Але, створюючи СТВ, Ейнштейн відкрив і знаменитий закон взаємозв’язку між енергією та масою, котрому немає аналогів у ньютонівській механіці. Про існування такого зв’язку можна здогадатись і встановити відповідні співвідношення, аналізуючи зв’язок між механічною енергією та роботою сил для релятивістської частинки.
Кінетична енергія релятивістської частинки
Одне з основних положень механіки – теорема про кінетичну енергію (Л1-6, п. 6.2), що встановлює зв’язок між нею та роботою сил (6.8), (6.8а), зберігає чинність і в релятивістській механіці. Але кінетична енергія визначається іншою, ніж у класичній механіці, формулою. Для її встановлення розглянемо роботу, яку виконує якась сила \( \vec{F}\) над релятивістською частинкою на переміщенні \( \mathrm{d}\vec{r} \) (рис 9.2). Згідно з (6.1) і (1.3)
|
\(\delta A=\vec{F}{d}\vec{r}=\vec{F}\vec{v}{d}t\) |
||
|
|

Відповідно до (9.3б), \(\vec{F}{d}t={d}({{m}_{r}}\vec{v})={{m}_{r}}{d}\vec{v}+\vec{v}{d}{{m}_{r}}\), де mr – релятивістська маса. Тому
|
\(\delta A=\vec{v}\left( \vec{v}{d}{{m}_{r}}+{{m}_{r}}{d}\vec{v} \right)={{v}^{2}}{d}{{m}_{r}}+{{m}_{r}}v{d}v\) |
(9.5) |
де враховано, що \({{\vec{v}}^{2}}={{v}^{2}}\) і \(\delta A=\vec{v}\left( \vec{v}{d}{{m}_{r}}+{{m}_{r}}{d}\vec{v} \right)={{v}^{2}}{d}{{m}_{r}}+{{m}_{r}}v{d}v\), (див. рис 9.2).
Для визначення dmr спочатку перетворимо (9.2):
|
\(m_{r}^{2}=\frac{m^{2}}{1-(v/c)^{2}}\) \(\Rightarrow\) \(m_{r}^{2}-m_{r}^{2}v^{2}/c^{2}\) \(\Rightarrow\) \(m_{r}^{2}c^{2}-m_{r}^{2}v^{2}=m^{2}c^{2}\) |
Тепер продиференцюємо отриманий вираз:
|
\(2m_{r}c^{2}\mathrm{d}m_{r}-2m_{r}v^{2}\mathrm{m_{r}}-2m_{r}^{2}v\mathrm{d}v=0\), |
звідки, після ділення на 2m, одразу одержимо вираз усієї правої частини (9.5):
|
\(v^{2}\mathrm{d}m_{r}+m_{r}v\mathrm{d}v=c^{2}\mathrm{d}m_{r}\). |
(9.6) |
Отже, з урахуванням (6.8), можна записати:
|
\(\mathrm{d}K=\delta{A}=c^{2}\mathrm{d}m_{r}\). |
(9.7) |
Звідси випливає, що приріст кінетичної енергії частинки зумовлений приростом її релятивістської маси. Якщо частинка перебуває у спокої, то К = 0 і mr = m. Тому, інтегруючи (9.7) у границях від 0 до К і від m до mr, знаходимо:
|
\(\int\limits_{0}^{K}\mathrm{d}K=\int\limits_{m}^{m_{r}}c^{2}\mathrm{d}m\) \(\Rightarrow\) \(K=c^{2}(m_{r}-m)\). |
(9.7а) |
Нарешті, врахувавши (9.2), одержимо формулу кінетичної енергії релятивістської частинки:
|
\(K=mc^{2}\left(\frac{1}{\sqrt{1-(v/c)^{2}}}-1\right)\). |
(9.8) |
При малих швидкостях (v << c) ця формула теж переходить у формулу кінетичної енергії ньютонівської механіки (6.7). Щоб у цьому переконатися, розкладемо перший доданок (9.8) у степеневий ряд за формулою бінома Ньютона:
\(\frac{1}{\sqrt{1-(v/c)^{2}}}=\left(1+(v/c)^{2}\right)^{-\frac{1}{2}}=1+\frac{1}{2}\frac{v^{2}}{c^{2}}+\frac{3}{8}\frac{v^{4}}{c^{4}}+...\).
При \(v\ll{c}\) можна обмежитися першими двома доданками, і тоді (9.8) трансформується в класичну формулу
\(K=\frac{mv^{2}}{2}\).
Зауважимо, що останній вираз є чинним тільки при малих швидкостях. Для швидких рухів він не придатний, навіть, якщо в нього замість маси спокою підставити релятивістську масу частинки.
Взаємозв’язок енергії і маси
Якщо розкрити дужки в (9.7а), то кінетична енергія релятивістської частинки постане у вигляді різниці двох величин:
|
\(K=m_{r}c^{2}-mc^{2}\). |
(9.9) |
Перша з них
|
\(E=m_{r}c^{2}\) |
(9.10) |
стосується частинки, що рухається, і називається повною (релятивістською) енергією. Друга
|
\(E_{0}=mc^{2}\) |
(9.11) |
відноситься до тієї ж частинки в стані спокою і, відповідно, називається енергією спокою.
За допомогою цих понять кінетична енергія (енергія руху) релятивістської частинки відповідно до (9.9) виражається дуже природньо: кінетична енергія – то є різниця енергії частинки в стані руху E та в стані спокою E0:
|
\(K=E-E_{0}\). |
(9.12) |
У зв’язку з цим виникає питання про природу енергії спокою, адже можна подумати, що то є, подібно до релятивістської маси, лише зручна формальна величина. Але Ейнштейн дійшов висновку, що енергія спокою є реальною фізичною величиною, що визначає узагальнену внутрішня енергію частинки (тіла). Якщо частинка є складною, приміром, як ядро атома, то енергія спокою включає енергію взаємодії складових частинок, але не тільки! Згідно з Ейнштейном, будь-яка елементарна частинка, котра “ні з чого не складається”, як от електрон, теж має відповідну енергію спокою. Реальність енергії спокою доводиться тим, що вона здатна перетворюватися на інші види енергії. При цьому будь-яка зміна енергії спокою супроводжується еквівалентною зміною маси спокою частинки:
|
\(\Delta{m}=\frac{\Delta{E_{0}}}{c^{2}}\). |
(9.13) |
Наприклад, при окисленні вуглецю (горінні) виділяється енергія, тож енергія молекули вуглекислого газу менша за сумарну енергію частинок, які беруть участь у реакції. Тому й маса спокою молекули вуглекислоти повинна бути менша, ніж сума мас спокою атома вуглецю та молекули кисню. Але в хімічних реакціях і взаємодії макроскопічних тіл зміна маси спокою настільки мізерна (див. Задача 9.8), що її неможливо виявити. Інша справа ядерні реакції, в яких взаємодіють ядра атомів або елементарні частинки надвисоких енергій. В таких процесах виділяються й поглинаються настільки великі енергії, що зміну маси спокою можна не тільки виявити, а й визначити на досліді. Зокрема, встановлено, що маса ядра будь-якого хімічного елемента менша за сумарну масу складових нуклонів у згоді з (9.13). Більше за те, завдяки цьому отримують промислову енергію на атомних електростанціях. Таким чином, формула (9.11) виражає один з найбільш фундаментальних законів природи – взаємозв’язок маси та енергії. Його глибинний зміст полягає в тому, що енергія є невід’ємною характеристикою матерії – будь-яка частинка чи тіло має відповідний (і дуже великий) запас енергії завдяки самому факту свого існування.
Зв’язок між енергією та імпульсом
Імпульс (9.1) і повна енергія (9.10) релятивістської частинки залежать від швидкості, отже й від системи відліку. Однак існує певна комбінація цих величин, яка є релятивістським інваріантом, тобто не залежить від системи відліку. З формули (9.2) маємо
|
\( {m}_{r}^{2}=\frac{m^{2}}{1-(v^{2}/c^{2})}\) \( \Rightarrow \) \( {m}_{r}^{2}c^{2}=m_{r}^{2}v^{2}=m^{2}c^{2}\). |
Домноживши цей вираз на c2 і врахувавши (9.10) і (9.1а), одержимо
|
\( {E^{2}}-p^{2}c^{2}=m^{2}c^{4}\). |
(9.14) |
Оскільки в правій частині фігурують тільки інваріантні величини т і с, величина, що стоїть у лівій частині, теж є релятивістським інваріантом, тобто, не залежить від системи відліку. Отже,
|
\( {E^{2}}-p^{2}c^{2}=\mathrm{inv} \). |
(9.15) |
Запишемо ще деякі корисні співвідношення. По-перше, вираз (9.14) зручно переписати у вигляді:
|
\( {E}=c\sqrt{p^{2}+m^{2}c^{2}}\). |
(9.16) |
Окрім того, безпосередньо з (9.1а) і (9.10) випливає співвідношення:
|
\( \vec{p}=\frac{E\vec{v}}{c^{2}}\). |
(9.17) |
Нарешті, з (9.14) і (9.12) можна отримати зв’язок між імпульсом і кінетичною енергією релятивістської частинки:
|
\( pc=\sqrt{{{E}^{2}}-{{m}^{2}}{{c}^{4}}}=\sqrt{{{\left( K+m{{c}^{2}} \right)}^{2}}-{{m}^{2}}{{c}^{4}}}=\sqrt{K\left( K+2m{{c}^{2}} \right)} \) |
звідки
|
\( p=\frac{1}{c}\sqrt{K\left( K+2m{{c}^{2}} \right)}\). |
(9.18) |
Зауважимо, що, відповідно до цього виразу, в ядерній фізиці та фізиці елементарних частинок імпульс прийнято вимірювати в одиницях енергії (МеВ), поділених на швидкість світла c, тобто – в МеВ/с.
Безмасові частинки
Сучасною наукою незаперечно встановлено, що в природі існують так звані безмасові частинки - частинки, які не мають маси спокою. Такими є фотони - елементарні частинки, що переносять електромагнітне випромінювання, зокрема, світло. З деякою імовірністю безмасовими є й різні види нейтрино – частинки, що народжуються в певних ядерних реакціях.
Для безмасової частинки т = 0, і з (9.16) випливає, що
|
\(E=pc\) або ж \(p=\frac{E}{c}\). |
(9.19) |
Ця формула узгоджується з (9.17) тільки за умови, що v = c. Отже, єдиним можливим станом безмасової частинки є рух із граничною швидкістю. Тому, стикаючись з іншими частинками, безмасові частинки або відбиваються без зміни величини швидкості, або поглинаються, тобто, припиняють своє існування. При цьому вони тілу, з яким стикаються, передають імпульс і, згідно з (9.3), створюють відповідну силу тиску. Тиск світла вперше виміряв учений Лебедєв. Отримані ним у дослідах значення тиску світла узгоджуються з теоретичними величинами, розрахованими на основі механізму зіткнень фотонів з частинками опромінюваного тіла. Це є одним із експериментальних підтверджень розглянутої концепції безмасових частинок і їхніх властивостей.
8.4. Контрольні запитання
1. Частинка рухається із швидкістю v = 0,6 с. У скільки разів її релятивістська маса більша за масу спокою?
2. З якою швидкістю рухається частинка, якщо її релятивістська маса в три рази більша за масу спокою?
3. На скільки відсотків релятивістська маса частинки більша за масу спокою при швидкості 30 Мм/с?
4. Релятивістська частинка має імпульс mс (m — маса спокою). Знайти швидкість частинки.
5. Знайти швидкість частинки, при якій її релятивістський імпульс у η = 2 рази перевищує ньютонівський імпульс.
6. Повна енергія тіла зросла на 1 Дж На скільки при цьому змінилася маса тіла?
7. На скільки повинна збільшитися повна енергія тіла, щоб його релятивістська маса зросла на 1 г?
8. Швидкість електрона v = 0,6 с. Знайти кінетичну енергію електрона в МеВ. Енергію спокою прийняти 0,5 МеВ.
9. При якій швидкості кінетична енергія будь-якої частинки дорівнює її енергії спокою?
10. Визначити швидкість електрона, якщо його кінетична енергія Т = 2,04 МеВ. Енергія спокою електрона E0 = 0,51 МеВ .
11. Показати, що релятивістський вираз кінетичної енергії T = (mr - m)c2 при V << c переходить у відповідний вираз класичної механіки.
12. Показати, що вираз релятивістського імпульсу через кінетичну енергію \({p}=\frac{1}{c}\sqrt{T(2E_0+T)}\) при V << c переходить у відповідний вираз класичної механіки .