ФІЗИКА ДЛЯ БАКАЛАВРІВ. КОЛИВАННЯ І ХВИЛІ
Частина І. КОЛИВАННЯ
3. Загасаючі та вимушені механічні коливання
Незагасаючі вільні коливання є ідеалізацією. В реальній коливальній системі завжди присутні різноманітні сили тертя і опору, які призводять до втрат енергії коливань. Тому в дійсності вільні коливання є загасаючими – їхня амплітуда невпинно зменшується від початкового значення аж до нуля. Основні властивості таких коливань розглянуті нижче у наступних питаннях:
3.1. Рівняння вільних загасаючих коливань
3.2. Параметри загасання вільних коливань
3.3. Вимушені механічні коливання. Резонанс
3.1. Рівняння вільних загасаючих коливань
Fоп = \( {-\alpha{v}}=-\alpha\frac{\mathrm{d}x}{\mathrm{d}t} \),
де \( {\alpha} \) – стала, яку називають коефіцієнтом опору. Знак “–” зумовлений тим, що сила опору напрямлена протилежно до вектора швидкості. В такому разі, згідно з другим законом Ньютона, рух тіла визначається рівнянням
\( {m}\frac{\mathrm{d}^{2}x}{\mathrm{d}t^{2}} \) \( =-kx-\alpha\frac{\mathrm{d}x}{\mathrm{d}t}\) \( \Rightarrow \) \( \frac{\mathrm{d}^{2}x}{\mathrm{d}t^{2}}+\frac{\alpha}{m}\frac{\mathrm{d}x}{\mathrm{d}t}+\frac{k}{m}x={0}\).
Уведемо співвідношення \(\left( {\alpha }/{m}\; \right)=2\beta, \) в якому \({\beta}\) називається коефіцієнтом загасання. Врахуємо також, що згідно з (2.6) і (2.7) \({k/m}=\omega_{0}^{2}\), де \({\omega_{0}}\) – частота вільних гармонічних коливань під дією квазіпружної сили. Її називають власною частотою коливальної системи. Після таких замін отримуємо диференціальне рівняння загасаючих коливань:
|
\(\frac{\mathrm{d}^{2}x}{\mathrm{d}t^{2}}+2\beta\frac{\mathrm{d}x}{\mathrm{d}t}+\omega_{0}^{2}x={0}\). |
(3.1) |
З математики відомо, що загальні розв’язки цього рівняння, отже й рух тіла, залежать від співвідношення між параметрами β і ω0. Зокрема, за умови β < ω0 рух тіла має коливальний характер. Це зрозуміло, бо за такої умови домінує квазіпружна сила, що спричинює коливання. А от при \(\beta\ge\omega_{0}\) сили опору є настільки великими, що рух тіла після виведенні з рівноваги є аперіодичним: на шляху від крайнього до середнього положення тіло втрачає практично всю свою механічну енергію і зупиняється. Аналіз такого руху не становить інтересу для теми лекції, тому далі розглядається лише випадок β < ω0. У цьому разі з (3.1) випливає наступне загальне рівняння координати тіла при загасаючих коливаннях:
|
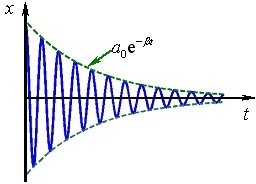
\( {x}{t}=A_{0}\mathrm{e}^{-\beta{t}}\cos{(\omega{t}+\varphi)}\), |
(3.2) |
Графік функції (3.2) показаний на рис. 3.1 (штрихові лінії визначають межі, в яких знаходиться зміщення х тіла з положення рівноваги).
 |
Циклічна частота загасаючих коливань дорівнює
| \( \omega = \sqrt{\omega_{0}^{2}-\beta^{2}}\). | (3.3) |
Відповідно, період
| \( {T}=\frac{2\pi}{\sqrt{\omega_{0}^{2}-\beta^{2}}}\). | (3.3а) |
|
\( {x(t)}=A(t)\cos (\omega{t}+\varphi) \). |
(3.4) |
де
|
\( {A}(t)={{A}_{0}}{{e}^{-\beta{t}}}\), |
(3.5) |
вільні коливання можливі лише за умови \( \beta<\omega_{0}\).
3.2. Параметри загасання вільних коливань
Для кількісної характеристики загасання коливань використовують декілька величин. Одна з них – коефіцієнт загасання β – фігурує безпосередньо в рівнянні (3.2). Що більша величина β, тим швидше спадає амплітуда коливань (рис. 3.2). Використовують також інші параметри загасання: час релаксації, логарифмічний декремент загасання та добротність.
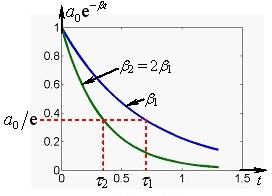 |
Часом релаксації τ — то є проміжок часу, за який амплітуда коливань зменшується в e ≈ 2,72 разів. Тож узявши до уваги вираз (3.4), отримаємо:
|
\( \frac{a_{0}e^{-\beta{t}}}{a_{0}e^{-\beta{(t+\tau)}}}={e} \) \( \Rightarrow \) \( e^{\beta\tau}=e \) \( \Rightarrow \) \( \tau=\frac{1}{\beta} \), |
(3.6) |
Таким чином, час релаксації є величиною оберненою до коефіцієнта загасання і показує наскільки повільно загасають коливання.
Логарифмічний декремент загасання λ – це логарифм відношення двох амплітуд, які відділені проміжком часу в один період:
|
\( \lambda =\ln\frac{A(t)}{A(t+T)}=\ln\frac{a_{0}e^{-\beta{t}}}{a_{0}e^{-\beta (t+T)}} \) \( \Rightarrow \) \( \lambda=\beta{T}=\frac{2\pi\beta}{\omega}\). |
(3.7) |
З урахуванням (3.6) можна також записати:
|
\( \lambda=\frac{T}{\tau}\). |
(3.7а) |
|
\( {N}_{e}=\frac{\tau}{T}=\frac{1}{\lambda}\). |
(3.8) |
Що більша величина Ne, тим довше в коливальній системі зберігаються вільні коливання, тобто тим якіснішою вона є. Але зазвичай якість коливальної системи характеризують не безпосередньо числом Ne, а добротністю Q – величиною, котра пов’язана з Ne або з декрементом загасання λ співвідношеннями:
|
\( {Q}=\pi{N}_{e}=\frac{\pi}{\lambda}\). |
(3.9) |
Згідно з (3.7) і (3.7а), добротність можна виразити через частоту та коефіцієнт загасання або через час релаксації та період вільних коливань:
|
\( {Q}=\frac{\omega}{2\beta}\), |
(3.9а) |
|
|
\( {Q}=\pi\frac{\tau}{T}\). |
(3.9б) |
Добротність характеризує також втрати енергії коливань унаслідок загасання. Можна показати, що при слабкому загасанні (β << ω0)
|
\( {Q}=\frac{2\pi{W}}{|\Delta{W}|}\), |
(3.10) |
де W – енергія вільних коливань у даний момент часу, а |ΔW| – утрата енергії коливань за один період, починаючи від цього моменту.
3.3. Вимушені механічні коливання. Резонанс
Коливання різної природи широко використовуються в технічних пристроях і машинах, тому вони мають бути незагасаючими. Для цього до системи треба весь час підводити енергію, аби компенсувати завжди наявні втрати енергії коливань. Отже, незагасаючими можуть бути лише вимушені коливання, що створюються і підтримуються завдяки постійному періодичному зовнішньому впливу на систему.
Рівняння вимушених коливань. Вимушені механічні коливання відбуваються під дією періодичної зовнішньої спонукальної (змушуючої) сили, властивості якої й визначають характер коливань. Найпростішими є вимушені коливання тіла, на яке, крім квазіпружної сили Fпр = –kx та сили опору \( {F}_{оп}=-\alpha{v}\), діє гармонічна спонукальна сила
\( {F}=F_{0}\cos\omega{t} \).
У такому разі для тіла маси m рівняння руху (другий закон Ньютона) має вигляд:
\( {m}\frac{\mathrm{d}^{2}x}{\mathrm{d}t^{2}}=-kx-\alpha\frac{\mathrm{d}x}{\mathrm{d}t}+F_{0}\cos\omega{t}\).
Увівши стандартні параметри \(\alpha /m=2\beta \), \({k/m}=\omega_{0}^{2}\) і позначення \( {f_{0}}=F_{0}/{m}\), це рівняння можна переписати у загально прийнятому вигляді диференціального рівняння вимушених коливань під дією гармонічної спонукальної сили:
|
\(\frac{\mathrm{d}^{2}x}{\mathrm{d}t^{2}}+2\beta\frac{\mathrm{d}x}{\mathrm{d}t}+\omega_{0}^{2}x=f_{0}\cos\omega{t}\). |
(3.11) |
У такому вигляді воно є чинним не лише для координати, а й для будь якої іншої фізичної величини.
Із математики відомо, що загальний розв’язок диференціального рівняння такого виду складається з двох доданків:
\( {x}(t)=a_{0}e^{-\beta{t}}\cos{(}\omega^{\prime}{t} + \varphi)+A\cos{(}\omega{t}-\varphi_{0}{)}\),
де величина \( \omega\prime = \sqrt{\omega_{0}^{2}-\beta^{2}}\) збігається з частотою вільних загасаючих коливань (3.3). Отже, можна говорити, що тіло бере участь у двох рухах: 1) загасаючих коливаннях із частотою і 2) незагасаючих коливаннях із частотою спонукальної сили ω. Але внесок від першого доданку з плином часу зменшується, тому амплітуда коливань поступово наближається до незмінної величини A, як показано на рис. 3.3.
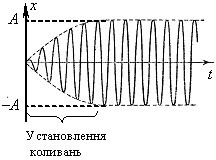 |
Це відбувається за певний час установлення, що є сумірним із часом релаксації \({\tau}\) вільних загасаючих коливань. Наприклад, за час \( {t}=5\tau \) амплітуда вимушених коливань досягає величини 99,5% від усталеної величини A. Відтак установлюються гармонічні стаціонарні вимушені коливання, що відбуваються за законом:
|
\( {x(t)}=A\cos{(}\omega{t}-\varphi_{0}{)}\). |
(3.12) |
Амплітуду A та початкову фазу φ0 вимушених коливань можна визначити різними способами. Наприклад, підставивши функцію (3.12) в рівняння (3.11) і побудувавши відповідну векторну діаграму (див. Розділ І, п. 1.2). Відповідні розрахунки дають:
|
\( {A}=\frac{f_{0}}{\sqrt{(\omega_{0}^{2}-\omega^{2})^{2}+4\beta^{2}\omega^{2}}}\), |
(3.13) |
і
|
\( \mathrm{tg}\varphi_{0}=\frac{2\beta\omega}{\omega_{0}^{2}-\omega^{2}}\). |
(3.14) |
Ці вирази указують на суттєві відмінності між вимушеними та вільними коливаннями:
1. У той час, як частота вільних коливань визначається параметрами коливальної системи, частота вимушених коливань від них ніяк не залежить і повністю визначається частотою спонукальної сили;
2. Амплітуда і початкова фаза вимушених коливань залежать як від властивостей спонукальної сили (амплітуди F0 та частоти ω, так і від властивостей коливальної системи (власної частоти ω0 та коефіцієнта загасання β). У той же час амплітуда та початкова фаза вільних коливань “ні від чого не залежать” і визначаються тільки способом виведення системі із стану рівноваги – величиною початкового відхилення, або початкової швидкості тіла;
3. Амплітуда вимушених коливань є функцією частоти: A = A(ω).
Резонанс. Проаналізуємо характер залежності амплітуди вимушених коливань від частоти, задля чого будемо подумки поступово збільшувати величину ω у виразі (3.13). Відтак при наближенні величини ω до ω0 перший доданок під коренем у (3.13) буде швидко зменшуватися, наближаючись до нуля, а по тому – так само швидко збільшуватись. Відповідно, амплітуда A спочатку буде зростати, а потім спадати, проходячи при певному значенні частоти ω = ωр через максимум. Таке зростання амплітуди вимушених коливань при наближенні частоти спонукальної сили до певної величини ωр називається резонансом, а частота ωр — резонансною частотою. Резонансну частоту можна знайти, дослідивши підкорінну функцію в (3.13) на мінімум. Відповідний розрахунок дає
|
\( \omega_{p}=\sqrt{\omega_{0}^2-2\beta^{2}}\). |
(3.15) |
Підставивши цей вираз у (3.13), визначимо резонансну амплітуду:
|
\( {A_{p}}=\frac{f_{0}}{2\beta\sqrt{\omega_{0}^{2}-\beta^{2}}}\). |
(3.16) |
Отримані вирази показують, що резонансна частота та резонансна амплітуда залежать від коефіцієнта загасання коливальної системи β. При його зменшенні резонансна частота ωр наближається до власної частоти ω0, а резонансна амплітуда Ар зростає, як показано на рис. 3.4.
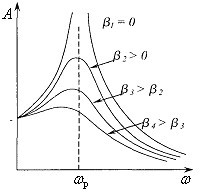
При β = 0 формула (3.15) дає ωр = ω0, а (3.16) – \( {A}_{p}\to\infty \). Але повністю позбутися загасання неможливо, можна лише зробити його слабким, так, що β << ω0. При цьому резонансна частота практично збігається із власною частотою системи ωр = ω0, але резонансна амплітуда коливань лишається скінченною.
Резонанс є важливим явищем, яке широко використовується в техніці. Приміром, на явищі резонансу ґрунтується дія язичкового частотоміра. Використовують це явище і в резонансних машинах, які призначені для випробування матеріалів на міцність. Широко використовують резонанс в акустиці, електро- та радіотехніці, тощо. Але явище резонансу може бути і шкідливим. До прикладу, відомо, що в масивних обертових вузлах машини при недостатньо точній збалансованості мас під час роботи виникають великі періодичні сили, що діють на підшипники, опору машини, корпус корабля, тощо. Частота таких сил, яка дорівнює частоті обертання валу, може збігтися з власною частотою коливань певної частини машини. При цьому виникнуть сильні резонансні коливання, що може призвести до поломки валу або руйнування фундаменту. Так само через недоліки в конструкції літака при певній швидкості польоту можуть виникнути руйнівні коливання крил. Тому при розробці подібних машин і пристроїв приділяють велику увагу запобіганню можливості виникнення резонансних коливань або, принаймні, їхньому послабленню до безпечного рівня.
Контрольні запитання
1. Чи можливі вільні гармонічні коливання в реальній механічній системі? Чому?
2. Якщо тіло маси m здійснює коливання в середовищі, де на нього діє сила опору
F = – \(\alpha{v}\), то чому дорівнює коефіцієнт загасання коливань?
3. Чи є вільні загасаючі коливання гармонічними? Строго періодичними?
4. Чому частота вільних загасаючих коливань маятника менша, ніж його власна частота?
5. Назвіть ті величини, що визначають швидкість загасання коливань і ті, що характеризують їхню тривалість
6. Що показує час релаксації коливань?
7. Що називається логарифмічним декрементом загасання? Як він пов’язаний з часом релаксації?
8. Яку кількість вільних коливань здійснює точка за час релаксації при логарифмічному декременті загасання λ?
9. Що таке добротність коливальної системи? Як вона виражається через циклічну частоту та коефіцієнт загасання?
10. Який зв’язок існує між втратами енергії загасаючих коливань і добротністю системи?
11. Від чого залежать частота стаціонарних вимушених коливань і частота вільних коливань?
12. Від чого залежать амплітуда стаціонарних вимушених коливань і амплітуда вільних коливань?
13. У чому полягає явище резонансу? Від чого і як залежить резонансна частота вимушених гармонічних коливань точки?